Раздел: Документация
0 ... 76 77 78 79 80 81 82 ... 87 Ml, Нм; ю-25, рад/с; Юр, рад/с; У2-50, Вб
О0,040,080,12/, с а I, А
О0,040,080,12/, с б Рис. 8.14. Переходные процессы в системе регулирования скорости при малых входных воздействиях: а - кривые потокосцепления ротора скорости, частоты и момента двигателя: / - потокосцепление ротора; 2 - скорость; 3 - роторная частота; 4 - момент двигателя; б - кривые тока: / - по продольной оси; 2 - по поперечной оси ветствующее задаваемой скорости, равной 1,5 рад/с. При /=0,08 с скачком увеличивается момент нагрузки от значения, равного нулю, до номинального, равного примерно 7 Н-м. Из приведенных осциллограмм видно, что переходные процессы практически Ml, Нм; со, рад/с; шр, рад/с; ¥2-50, Вб 60 40 20 0 -20 0 0,05 0,1 0,15 0,2 0,25 0,3 0,35 /, с Рис. 8.15. Характеристики пуска привода на скорость 75 рад/с: / - скорость; 2 - потокосцепление ротора; 3 - роторная частота; 4 - момент двигателя соответствуют настройке на ОМ. Из нижней осциллограммы очевидно, что взаимовлияние контуров токов по продольной (/]0,) и поперечной (/1р) осям практически отсутствует. Значительное падение скорости при набросе нагрузки объясняется тем, что при настройке на ОМ применен пропорциональный регулятор скорости. Для удобства размещения на одном рисунке различных переменных при изображении некоторых величин использованы указанные на осциллограммах масштабирующие коэффициенты. На рис. 8.15 приведена осциллограмма пуска вхолостую электродвигателя на скорость 75 рад/с. Ограничение регулятора момента выполнено на уровне, соответствующем току 7А по оси д, регулятора скорости - на уровне, соответствующем двухкратному номинальному моменту Маогр = 2-7,4 = 14,8 Нм. Пуск происходит при постоянном потокосцеплений ротора. 8.9. Расчет динамики следящего электропривода переменного тока на примере азимутального привода крупного радиотелескопа В данном разделе в качестве примера расчета следящего электропривода приводятся расчеты электропривода, предназначенного для вращения по азимуту поворотной части крупного радиотелескопа с диаметром зеркала 70 м. Наземные радиотелескопы с параболическим зеркалом являются одним из основных типов радиоастрономических инстру- 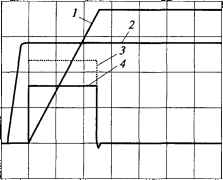 ментов, предназначенных для исследования космического пространства. Погрешность наведения зеркала на исследуемый объект при работе в миллиметровом диапазоне радиоволн не должна превышать единиц угловых секунд. Достижение такой точности представляет собой сложную научно-техническую задачу, в решении которой не последняя роль принадлежит силовым следящим электроприводам, перемещающим по азимуту и углу места поворотную часть радиотелескопа, включающую в себя главное зеркало и элементы несущей конструкции. Одной из особенностей радиотелескопа, как объекта управления, является ограниченная жесткость самого зеркала и несущей его конструкции, в результате чего механическую часть конструкции приходится рассматривать как многомассовую упруго-вязкую систему. Вторая особенность состоит в том, что значение момента нагрузки на поворотной части, обусловленное массой самой поворотной части и ветровыми нагрузками на главное зеркало, достигает сотен тысяч ньютон-метров, что исключает возможность применения в приводе тихоходных двигателей и делает необходимым использование редукторных приводов с передаточным числом редуктора порядка десятков тысяч единиц. К числу основных путей, обеспечивающих достижение требуемой точности следящего электропривода, могут быть отнесены: 1)минимизация влияния упругих свойств конструкции на точность слежения путем расширения объема информации о движении элементов конструкции, вводимого в систему управления электроприводом. В основу построения системы может быть положен принцип модального управления с использованием наблюдающего устройства (наблюдателя) [27] при измерении скорости одной или нескольких представительных точек конструкции специальными датчиками; 2)исключение влияния зазоров в кинематической цепи привода главного зеркала, что достигается применением двухдвига-тельного электропривода с электромеханической выборкой зазора. При малых моментах нагрузки один из этих двигателей работает в двигательном режиме, а второй - в тормозном. По мере увеличения нагрузки тормозной момент двигателя, работающего в тормозном режиме, уменьшается, а при дальнейшем ее росте двигатель переходит в двигательный режим; 3)обеспечение плавного движения зеркальной части радиотелескопа как при малых, так и при больших заданных угловых перемещениях путем применения регулятора положения с перестраиваемой структурой и изменяемыми параметрами. Современным решением для следящих электроприводов радиотелескопов является применение в них двигателей переменного тока. Это соответствует существующим в настоящее время тенденциям развития электропривода и позволяет использовать в каче- 9 Соколовский 241 0 ... 76 77 78 79 80 81 82 ... 87
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
