Раздел: Документация
0 ... 77 78 79 80 81 82 83 ... 87 стве скоростной подсистемы следящего привода комплектные электроприводы с приводными преобразователями, выпускаемыми отечественными и зарубежными фирмами. Структура азимутального следящего электропривода радиотелескопа /показана на рис. 8.16. Поворотная часть радиотелескопа вращается относительно неподвижного основания 4 на шаровом погоне. Два асинхронных двигателя Ml и М2 установлены на поворотной части и через редукторы Р1 и Р2 приводят во вращение две шестерни, которые, обкатываясь вокруг неподвижной шестерни, связанной с основанием, приводят во вращение поворотную часть. Двигатели получают питание от двух приводных преобразователей ПП1 и ПП2, основным элементом которых являются преобразователи частоты с автономными инверторами. Звеном постоянного тока, общим для обоих преобразователей, служит активный выпрямитель напряжения АВН (см. подразд. 4.5). Его применение обеспечивает обмен мощностью между питающей сетью и двигателями как в двигательном, так и тормозном режимах. В используемых двигателях имеется встроенный датчик, сигналы которого после обработки в приводном преобразователе используются как сигналы истинного значения скорости. Контур, включающий в себя приводной преобразователь с регуляторами тока и скорости, асинхронный двигатель, наблюдатель, с помощью которого восстанавливаются неизмеряемые координаты механической части системы, и модальный регулятор, являются скоростной подсистемой следящего электропривода. Рассматриваемый радиотелескоп, как объект электропривода, представляет собой многомассовую упруго-вязкую механическую конструкцию. С учетом этого обстоятельства регулятор в скоростной подсистеме электропривода строится по принципам модального управления с применением наблюдателя, с помощью которого определяются (восстанавливаются) переменные, необходимые для построения модального регулятора. Теоретически принцип модального управления предполагает замыкание системы управления по полному вектору состояний, порядок которого равен порядку системы. Однако целесообразность и практическая реализуемость такого подхода вызывает сомнения по ряду причин. Во-первых, как показали эксперименты на действующем радиотелескопе [6], резонансная частота первого тона упругих колебаний остается практически неизменной при изменении положения зеркала по углу места. Поэтому высокочастотные резонан-сы менее стабильны, что затрудняет использование модального регулятора с постоянной настройкой. Во-вторых, наличие в системе ряда звеньев с малыми постоянными времени ограничивает возможное быстродействие, в ре- -50 Гц 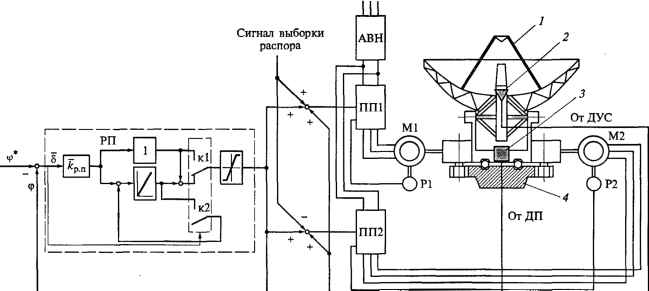 Наблюдатель и модальный регулятор Рис. 8.16. Структура азимутального следящего электропривода крупного радиотелескопа: 1 - радиотелескоп; 2 - датчик угловой скорости; 3 - датчик положения; 4 - неподвижное основание зультате чего оказывается, что излишнее расширение объема информации о координатах объекта не дает желаемого эффекта. В-третьих, поскольку для плавного движения исполнительного органа (зеркала) необходимо увеличение колебательности движения приводных двигателей, нужно принимать во внимание характер изменения скорости двигателя, необходимый для обеспечения быстрого и плавного перемещения исполнительного органа (зеркала). В-четвертых, понятие «полного вектора состояния механизма» в известной мере условно, так как в такой сложной электромеханической системе, как крупный радиотелескоп, число масс разработанной модели ограничено, в первую очередь, полосой частот, в которой производились исследования в ходе идентификации. С учетом этого можно сформулировать следующий подход к построению скоростной подсистемы радиотелескопа как сложной электромеханической системы: скоростная подсистема должна быть выполнена так, чтобы при ограничении размерности вектора координат, по которому осуществляется ее замыкание, обеспечивалось отсутствие в скорости исполнительного органа колебаний на частоте одного или двух низкочастотных резонансов при ограничении высокочастотных колебаний на допустимом уровне. Как показывает опыт, целесообразно ограничить размерность вектора состояний на уровне, соответствующем двух- или трехмас-совому объекту. Эта цель в многомассовой системе может быть достигнута при замыкании системы управления через наблюдателя, в основу которого положена упрощенная двух- или, максимум, трехмассовая модель объекта, собственные частоты которой выбраны равными частотам, соответственно, одного или двух нижних резонансных тонов многомассового механизма. Такое построение системы позволяет получить положительный эффект при измерении скорости двигателя и скорости одной из масс механизма. Для исключения влияния зазоров в кинематической цепи привода применяется электромеханическая выборка зазора. Для этого на входы токовых контуров преобразователей следует подать управляющие сигналы задания распора разного знака на входы токовых контуров преобразователей. При применении в скоростной подсистеме стандартных преобразователей, в которых обычно нет прямого доступа к токовым контурам, сигналы задания распора могут быть поданы на входы контуров скорости при условии применения пропорциональных регуляторов скорости (см. рис. 8.16). Внешним по отношению к скоростной подсистеме является контур регулирования положения с датчиком положения 3 и регулятором положения (РП). Регулятор положения имеет переклю- 0 ... 77 78 79 80 81 82 83 ... 87
|
