Раздел: Документация
0 ... 78 79 80 81 82 83 84 ... 87 чающуюся структуру. Переключения осуществляются электронными ключами к1 и к2, состояние которых определяется значением угловой ошибки 5. При малой ошибке ключи находятся в показанном на рисунке состоянии и регулятор является пропорционально-интегральным. Если ошибка больше некоторого наперед заданного значения, то ключи переключаются в верхнее положение и регулятор переходит в пропорциональный режим. При работе в пропорциональном режиме неработающий интегратор шунтируется, превращаясь в апериодическое звено. Применение такого регулятора позволяет получить допустимую ошибку в режиме слежения или программного управления и обеспечить согласование без значительного перерегулирования в режиме позиционирования. Блок ограничения на выходе регулятора положения ограничивает предельно допустимую скорость двигателя номинальным значением. Структурная схема скоростной подсистемы в относительных единицах показана на рис. 8.17. Математическое описание объекта управления представлено в виде четырехмассовой упруго-вязкой разветвленной системы, полученной на основании экспериментов на действующем радиотелескопе. Модель асинхронного двигателя выполнена по схеме, аналогичной рис. 8.12, но без контура регулирования момента и в относительных единицах. Значение потокосцепления ротора поддерживается постоянным путем задания постоянного значения тока статора по прямой оси. Как отмечалось в подразд. 6.3, при векторном управлении математическое описание асинхронного двигателя во вращающейся системе координат практически совпадает с математическим описанием двигателя постоянного тока с независимым возбуждением. Математическое описание схемы двигателя приведено на рис. 8.12 и 8.13. Поэтому, чтобы не усложнять рисунок изображением схем двух уже описанных асинхронных двигателей и токовых контуров, на рис. 8.17 токовые контуры показаны в виде эквивалентных апериодических звеньев с постоянными времени Т1э. На входы блоков, моделирующих зазоры в кинематических цепях, поданы разности углов ср{ - ф2 и <р* - ф2, каждая из которых определена, как интеграл от разности соответствующих скоростей. Величина половины зазора обозначена как ф0. Далее показана схема узлов упруго-вязкой системы, в которых постоянные времени жесткости описываются выражением TciJ - Мб/(соб Су), а механические постоянные времени - выражением Тш = Jf соб/ М5 (су - коэффициент жесткости связи между /-Й и j-Vi массами; J,- - момент инерции /-й массы; М6 - базовый момент; соб - базовая скорость). Коэффициенты демпфирования обозначены ку. Управляющим воздействием для скоростной подсистемы является напряжение на выходе регулятора положения ырп, возмущающее ю OS Сигнал выборки зазора W 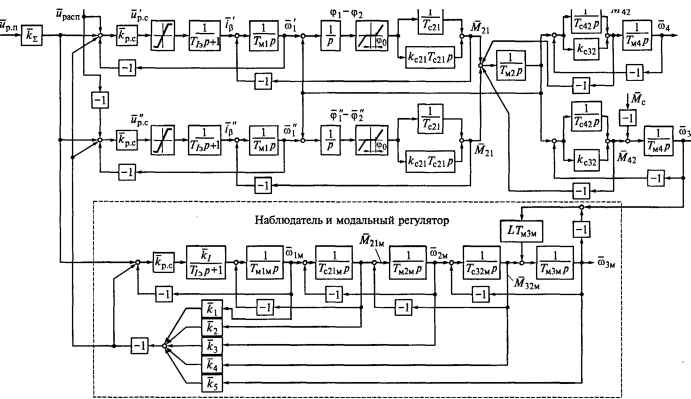 Рис. 8.17. Структурная схема скоростной подсистемы воздействие в виде момента нагрузки Мс приложено к третьей массе, которая моделирует зеркало. Параметры механической части привода, приведенные в табл. 8.5, получены в результате обработки экспериментальных частотных характеристик, снятых на однотипном радиотелескопе. Постоянные времени нормированы относительно базовых значений соб = 147 рад/с и М6 = 58 Нм, принятых по номинальным данным двигателя: 8,5 кВт, 1400 об/мин (147 рад/с), 58 Н-м. Эти значения использованы при определении механической постоянной времени первой массы. Момент инерции намеченного к применению асинхронного двигателя компании SEW Eurodrive типа CV160M4 равен 0,04 кг-м2. Считая, что момент инерции редуктора примерно равен половине момента инерции двигателя, определим механическую постоянную времени первой массы: Tui = /iC06/M6 = 0,06 • 147/58 = 0,152 с. Поскольку механическая постоянная времени первой массы более чем на порядок превышает механическую постоянную времени второй массы, при расчете параметров регулятора скорости влиянием обратной связи по упругому моменту М2Х можно пренебречь. Постоянная времени токового контура принята равной Т1э = 0,01 с, коэффициент регулятора скорости определен из условия настройки контура скорости на оптимум по модулю как чр.с = 15,2. В основу наблюдателя, с использованием которого реализуется модальное управление скоростной подсистемой (см. рис. 8.17), положена упрощенная, трехмассовая, модель упругого объекта с контуром скорости. При этом два двигателя, параллельно работающие на общую нагрузку, эквивалентированы одним двигателем, создающим вращающий момент, равный суммарному моменту обоих двигателей. Это достигается увеличением в два раза передаточного коэффициента замкнутого контура тока, равного в относительных единицах к1 = 2. Эквивалентный двигатель характеризуется суммарной механической постоянной времени, равной Таблица 8.5 Параметры механической части привода радиотелескопа
0 ... 78 79 80 81 82 83 84 ... 87
|
|||||||||||||||||||||||||||||||||||||||
