Раздел: Документация
0 ... 79 80 81 82 83 84 85 ... 87 ТмШ = 2-0,152 = 0,304 с. Упругий момент связи между первой и второй массами также должен быть увеличен в два раза путем удвоения коэффициента жесткости связи, т. е. уменьшением в два раза постоянной времени жесткости по сравнению с Тс21. Но поскольку значение Тс21, приведенное в табл. 8,5, определено по результатам эксперимента на объекте, при котором двигатели работали параллельно, в модели наблюдателя принято Tc2iM = 0,151 с, а в модели каждого канала объекта Тс21 = 0,302 с. Измеряемой координатой в конструкции механизма является скорость зеркала. Для ее измерения предусмотрен гироскопический датчик угловой скорости (ДУС), отмеченный на рис. 8.16 заштрихованным треугольником. Невязка рассчитывается как разность измеренной скорости зеркала и скорости третьей массы в модели упругого объекта ю3 -со3м. Расчет коэффициентов модального регулятора в относительных единицах произведен путем выбора желаемого характера распределения корней характеристического уравнения модели, положенной в основу наблюдателя (см. рис. 8.7), при замыкании ее пропорциональными обратными связями по координатам со]м; б>2М;со3м; М2Ы; МПы: det[/?I-A + Bk] = 0. В характеристическом уравнении обозначено:
Ъ = \Т-\и 0 0 0 0j; к = крск, +1) к2 кг fc, к5 I - единичная матрица. При расчете эквивалентная малая постоянная времени контура тока считалась пренебрежимо малой (Т1э = 0). Принимая вид желаемого полинома соответствующим стандартному распределению корней по Баттерворту [27] #о (р) = Р5 + 3,24о)о/ + 5,2Щр3 + 5,24а?0р2 + 3,24ю + tog и при выбранном значении среднегеометрического корня coq = 20 с-1 записывая равенство />1-А + Вк = Н0(р), получим значения коэффициентов, входящих в матрицу-строку к: kPJ, (к, -1)=19,7; kpJ,k2 = 47,83; kpJ,k3 = -14,93; kjc, = -13,87; крск/к4 = -13,87; крск,к5 =8,13, а затем при известных значениях АрС = 15,2 и = 2 - значения коэффициентов модального регулятора: кх = -0,35; кг = 1,57; кг = -0,49; к4 = -0,46; к5 = 0,27. Моделирование электропривода выполнено в среде MATLAB Simulink. Модель скоростной подсистемы соответствовала рис. 8.17. Управляющее воздействие Прм = 1 подавалось на вход системы через фильтр в виде апериодического звена с постоянной времени 0,1 с через одну секунду после начала отсчета. Возмущающее воздействие Мс =0,5 вводилось на третью массу через 10 с после начала переходного процесса по управлению. В тех случаях, когда рассматривалась система с зазором, величина зазора устанавливалась равной Фо = ±0,2. При исследовании режима выборки зазора момент распора был равен Мрасп =±0,2. Сигнал выборки зазора подавался до момента подачи управляющего воздействия.
0 2 4 6 8 10 12 14 16 18 /, с Рис. 8.18. Расчетная осциллограмма отработки малого управляющего воздействия с последующим набросом момента в скоростной подсистеме без выборки зазора и модального регулятора: 1 - скорость третьей массы (зеркало); 2 - скорость каждого из двигателей; 3 - момент каждого из двигателей 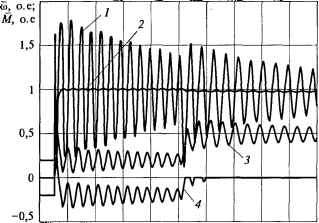 О 2 4 6 8 10 12 14 16 18 /, с Рис. 8.19. Расчетная осциллограмма отработки малого управляющего воздействия с последующим набросом момента в скоростной подсистеме с выборкой зазора без модального регулятора: 1 - скорость третьей массы (зеркало); 2 - скорость каждого из двигателей; 3 - момент первого двигателя; 4 - момент второго двигателя Результаты моделирования скоростной подсистемы приведены на рис. 8.18...8.20. На рис. 8.18 показаны переходные процессы в скоростной подсистеме без модального управления с зазорами и без выборки зазора. Колебания на частоте первого тона демпфируются только за счет сил трения, моделируемых коэффициентами кс21 и kci2 (см. рис. 8.17), на холостом ходу имеют место явно выраженные автоколебания, которые переходят в затухающие колебания, характер которых близок к колебаниям в линейной системе при введении нагрузки. На рис. 8.19 изображены переходные процессы в скоростной подсистеме без модального регулятора с выборкой зазора, но с введением выборки мертвого хода. Процесс практически не отличается от процесса в линейной системе. На рис. 8.20 показаны переходные процессы в системе с модальным регулятором при наличии зазора и выборки зазора. Колебания на частоте первого тона полностью демпфируются действием привода, имеют место только колебания с небольшой амплитудой на частоте колебаний четвертой массы с механической постоянной времени Тмч. Выполненное моделирование подтверждает эффективность рассматриваемой структуры скоростной подсистемы как при управляющем, так и при возмущающем воздействиях. 0 ... 79 80 81 82 83 84 85 ... 87
|
