Вы находитесь в разделе Типовых решений систем безопасности
1.4. действия сил охраныЕсли связь средств задержки доступа нарушителей с телевидением видна лишь при внимательном рассмотрении СФЗ, то влияние телевидения на действия сил охраны очевидно. Далее показывается, как использование систем видеонаблюдения меняет структуру и алгоритм действий сил охраны, одновременно повышая вероятность защиты объекта. Ведомственные силы охраны в зависимости от категории объекта могут быть полностью или частично дислоцированы на его территории. В силы охраны могут входить также подразделения МВД местного и федерального подчинения, войсковые формирования и специальные отряды других силовых структур. Вероятность защиты объекта (вероятность успешного выполнения СФЗ своей задачи) определяется как произведение вероятностей выполнения своей задачи каждой из трёх указанных составляющих системы физической защиты – средств обнаружения, физических барьеров и сил охраны:
P(RA) – вероятность развёртывания сил охраны в точке перехвата при условии приёма сигнала тревоги; P(VR) – вероятность нейтрализации нарушителей при условии своевременного развертывания сил охраны. Вероятность P(A) получения силами охраны сигнала тревоги является произведением вероятности P(Dr) обнаружения нарушителей техническими средствами охраны, зависящей от числа r рубежей охраны и вероятности P(С) установления связи системы обнаружения с силами ответного действия:
Таблица 1.9
При построении двухрубежных периметровых систем обнаружения для первого из рубежей охраны приоритет следует отдать достоверности обнаружения, а для второго – точности определения координат вторжения. Это означает, что длины участков зон обнаружения первого рубежа следует выбирать большими, чем длины участков зон обнаружения второго рубежа. Таким способом в двухрубежной системе будут снижены затраты на охрану периметра техническими средствами при высокой точности определения места вторжения. Достоверность определения места нарушения при использовании телевизионных охранных систем P(L)тв с увеличением средств, отводимых на систему обнаружения, возрастает быстрее, чем достоверность P(L)п при использовании только периметровых технических средств охраны. Более быстрый рост точности определения места вторжения при использовании охранного телевидения объясняется технологической причиной – чрезвычайно низкой стоимостью твердотельных телевизионных камер, приведённой к одному биту передаваемой информации. Вероятность P(VR) нейтрализации нарушителей при условии своевременного развертывания является функцией соотношения сил охраны и нарушителей. Для предварительных оценок надёжности систем физической защиты целесообразно воспользоваться упрощённым методом оценки соотношения сил, в котором учитываются только численность охраны и нарушителей и точность оценки количества нарушителей. Жёсткая модель, используемая при моделировании столкновений вооружённых групп, получила название уравнений Ланчестера . Наиболее известное из них указывает, что эффективность боевой группы пропорциональна квадрату её численности. Уравнения применимы к столкновениям больших групп при многократности испытаний в идентичных условиях. В рассматриваемом случае взаимодействия малочисленных групп для предсказания исхода столкновения необходимо учитывать большое число параметров, среди которых – подготовленность и вооружённость участников столкновения, особенности местности и т. п. На основании этих данных, определённых по методу экспертных оценок, находят интенсивность поражения для каждой из противодействующих сторон. Соотношением интенсивностей поражения определяется вероятность P исхода столкновения (вероятность нейтрализации) при равенстве численности сторон. По аналогии с квадратичной зависимостью Ланчестера в рассматриваемом случае столкновения малых групп вероятность P(VR) нейтрализации нарушителей при превосходстве численности охраны n над численностью нарушителей m (n > m) можно представить в следующем упрощённом виде:
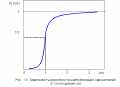 График построен для случая, когда при равенстве численности охраны и нарушителей возможные исходы (выполнение задачи или невыполнение её) равновероятны. Видно, что пренебрежение реальным соотношением сил даёт завышенное значение вероятности успешных действий сил охраны. Опираясь на рассчитанные значения вероятности успеха можно ввести коэффициент превосходства сил охраны k=n/m. Этот коэффициент, с одной стороны, должен обеспечивать высокую вероятность успеха сил охраны, а с другой – должен не превосходить некоторое значение ko, определяемого средствами, отводимыми на содержание охраны. В последнем случае вероятность успеха при любой достоверно известной численности нарушителей и возможности мобилизации соответствующей численности сил противодействия будет функцией только этого коэффициента k. Однако численность нарушителей заранее не известна и подлежит оценке. Таким образом, средства обнаружения должны не только формировать сигнал тревоги (констатация факта нарушения), но и оценку M численности нарушителей. Такая оценка силами охраны всегда получается с ошибками, поэтому истинная численность нарушителей может быть представлена в виде
Тогда вероятность нейтрализации с учётом коэффициента запаса и оценки числа нарушителей примет вид:
Нормативные характеристики функционирования подразделений вневедомственной охраны МВД РФ, наиболее часто выполняющих функции внешних сил подкрепления, приведены в табл. 1.9 . Таблица 1.10
Вероятность развёртывания сил охраны в нужное время и в нужном месте P(RA)=P(T)P(M)P(L) при увеличении затрат на периметровые средства обнаружения будет монотонно возрастать, приходя к насыщению при примерном равенстве радиуса визуального обнаружения нарушителей и ошибки определения места нарушения. Так как суммарные затраты Sо на технические средства и силы охраны в данном примере зафиксированы, то обсуждаемый рост вероятности развёртывания сил охраны P(RA) будет сопровождаться сокращением затрат на сами силы охраны. С другой стороны, чрезмерное уменьшение численности сил охраны влечёт за собой уменьшение вероятности нейтрализации нарушителей при их своевременном перехвате P(VR). В результате оказывается, что существует некоторое компромиссное распределение средств, обеспечивающее максимум вероятности P(V) защиты объекта (см. рис. 1. . 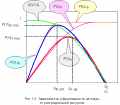
Читайте далее:  Анонс журнала бди, №6,69, 2006 Анонс журнала бди, №1,70,2007 экстремизм Анонс журнала бди №3,72, 2007 Анонс журнала бди, № 4 ,73,, 2007 Анонс журнала алгоритм безопасности №6, 2007 1 -10 апреля 2005 года Анонс журнала бди № 1 ,76, 2008 Анонс журнала алгоритм безопасности № 3, 2008 Анонс журнала бди №3 ,78, 2008 20 декабря 2005 года выходит в свет очередной 6-й номер журнала все о вашей безопасности 20 сентября выходит в свет 4-й номер журнала все о вашей безопасности 5 февраля выходит в свет первый номер журнала все о вашей безопасности 25 декабря выходит в свет очередной номер журнала тз 14 апреля выходит в свет очередной номер журнала тз ,технологии защиты, Анонс журнала бди, №6,69, 2006 Анонс журнала бди, №1,70,2007 экстремизм Анонс журнала бди №3,72, 2007 Анонс журнала бди, № 4 ,73,, 2007 Анонс журнала алгоритм безопасности №6, 2007 1 -10 апреля 2005 года Анонс журнала бди № 1 ,76, 2008 Анонс журнала алгоритм безопасности № 3, 2008 Анонс журнала бди №3 ,78, 2008 20 декабря 2005 года выходит в свет очередной 6-й номер журнала все о вашей безопасности 20 сентября выходит в свет 4-й номер журнала все о вашей безопасности 5 февраля выходит в свет первый номер журнала все о вашей безопасности 25 декабря выходит в свет очередной номер журнала тз 14 апреля выходит в свет очередной номер журнала тз ,технологии защиты, |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












