Раздел: Документация
0 ... 30 31 32 33 34 35 36 ... 57 предыдущей строки и амплитуда воспроизведенного сигнала определяет сигнал коррекции положения головки и соответственно шаг строчек записи. Частоты других четырех вспомогательных сигналов приближенно равны 102, 1-17, 149 и 164 кГц. Сигналы/i и/4 записываются первой видеоголовкой, а сигналы /2 и/з — второй, причем таким образом, что в период работы первой видеоголовки в режиме записи к видеосигналу добавляется то сигнал /1, то сигнал/4 (см. рис. 69). Например, если при воспроизведении строчки с записанным сигналом /4 амплитуды комбинационных составляющих с частотами /4-/3 или /4-/2 одинаковы, то видеоголовка находится как раз на строчке записи. В противном случае знак и величина асимметрии служат для выбора необходимых направления и величины коррекции. Если при воспроизведении следующих друг за другом строчек направление регулирования не меняется, то это означает, что скорость движения ленты при воспроизведении отличается от ее скорости при записи. Таким образом, можно получить сигнал рассогласования, необходимый для регулирования ведущего двигателя. Из вышесказанного следует, что в этой системе нет необходимости в сигнале управления и дорожке сигнала управления. Системы автоматического регулирования двигателей подающего и приемного узлов В зависимости от режима работы видеомагнитофона двигатели подающего и приемного узлов выполняют различные функции. В режиме записи и воспроизведения двигатели используются с целью создания постоянного натяжения ленты. Для этого необходим датчик натяжения ленты. Им служит направляющая, расположенная на натяжном рычаге. Траекторию —•&- 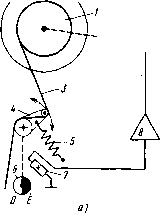  4N> [Mi 6) Рис. 70. Принцип автоматического регулирования натяжения ленты (а) (1 — катушка с лентой; 2 — двигатель приемного узла; 3 — лента; 4 — рычаг датчика натяжения; 5 — пружина 6, 7 — преобразователь положения датчика натяжения ленты в электрический сигнал (6 — магнит, закрепленный на оси рычага 4; 7 — датчик Холла); 8 — усилитель натяжения питания двигателя) и принцип действия преобразователя на основе датчика Холла (б) (датчик Холла при положении магнита, соответствующем номинальному натяжению ленты, формирует напряжение, равное 0 В; в крайних положениях рычага напряжение ±5 В [121]; для определения натяжения могут быть использованы и многие другие принципы)  п Селектир синхроим-1 пульсов Коммутатор OJ L О Телевизионный сигнал 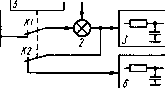 Рис. 71. Уменьшение искажений временного масштаба, возникающих из-за растяжения ленты, с помощью автоматического регулирования натяжения ленты. Из телевизионного сигнала выделяется строчный синхроимпульс 1 для синхронизации кольца ФАПЧ, состоящего из фазового дискриминатора 2, фильтра нижних частот 3 и генератора сигнала частоты строк 4. Коммутатор 5, управляемый сигналами тахогенератора барабана блока вращающихся головок, при нахождении головки на строчке записи поддерживает переключатели К, в замкнутом состоянии, аКг в разомкнутом состоянии. В конце строчки записи переключатель /f, размыкается, а генератор 4 вследствие большого значения постоянной интегрирования фильтра нижних частот продолжает работать с неизменным сигналом управления, т. е. генерирует сигнал стой же частотой. При входе головки на следующую строчку записи переключатели К, и Кг замыкаются, и на выходе фазового дискриминатора 2 появляется сигнал рассогласования, соответствующий скачку временного масштаба, который интегрируется фильтром нижних частот 6. Задем в комбинации с сигналом датчика натяжения ленты сигнал рассогласования используют для регулирования скорости вращения двигателя приемного блока ленты. После скачка временного масштаба коммутатор размыкает контакты переключателя к2 [ 108] ленты формируют таким образом, чтобы направляющая меняла направление движения ленты, и добиваются, чтобы натяжения пружины и ленты были уравновешены. На оси натяжного рычага размещается преобразователь механических перемещений в электрический сигнал, например датчик Холла или мост, построенный на основе вращающегося магнита и магнитных сопротивлений. Подобные преобразователи позволяют получить сигнал ошибки, пропорциональный направлению и величине отклонения натяжного рычага от его номинального положения. Данный сигнал служит для регулирования момента двигателя (рис.70) [121]. В наклонно-строчных аппаратах вследствие трения в направлении движения ленты все в большей степени увеличивается упругая деформация ленты. Если данная деформация неодинакова при записи и воспроизведении, то в процессе воспроизведения возникают искажения временного масштаба. Временные искажения непрерывно увеличиваются вдоль строчки видеосигнала. Таким образом, при смене строчек наблюдается скачок: частота следо- вания строчных синхроимпульсов, воспроизведенных сходящей со строчки записи головкой, отличается от частоты следования строчных синхроимпульсов, воспроизводимых входящей на строчку записи головкой. Данный скачок может быть использован и для регулирования натяжения ленты, поскольку, изменяя натяжение ленты, можно частично скомпенсировать деформацию ленты [112]. Данная система автоматического регулирования натяжения ленты позволяет уменьшить временные искажения (рис. 71) [108]. В режиме перемотки необходимо также обеспечивать регулирование натяжения ленты или по крайней мере поддержание натяжения ленты в определенный пределах. Кроме того, необходимо обеспечить возможность изменения направления перемотки и ручного регулирования скорости перемотки. Последнее требование может быть дополнено требованием ручного управления скоростью движения ленты. Данные требования могут быть удовлетворены с помощью ранее рассмотренных принципов. Система перемотки может также включать: систему предпускового натяжения ленты, систему сигнализации окончания перемотки, выключатель двигателя при окончании перемотки и т. д, однако эти системы здесь не рассматриваются. Переключение видеоголовок Во всех видеомагнитофонах с двумя и более головками (кроме наиболее простых бытовых аппаратов) головки работают попеременно. К усилителю воспроизведения всегда подключается только одна головка, находящаяся в контакте с лентой. Это необходимо для того, чтобы была возможность исключить не только эксплуатационные шумы, но и шумы головки, тепловые и связанные с изменением условий окружающей среды. Это важно и потому, что в период перекрытия сигналы, воспроизводимые входящей на строчку записи и сходящей с нее головками, несколько отличаются. Суммирование этих сигналов в течение всего периода перекрытия привело бы к биениям между ними. Любое переключение связано с возникновением переходных процессов, но они кратковременны. При этом переключение головок может быть произведено в наименее уязвимый к помехам интеррал телевизионного сигнала. Будем рассматривать особенности переключения видеоголовок при поперечно-строчной записи четырьмя головками, так как переключение видеоголовок в двухголовочных сегментированных и несегментированных видеомагнитофонах базируется на таких же принципах, а устройство переключения проще. В аппаратах с поперечно-строчной системой записи четырьмя головками для переключения видеоголовок используются два метода: двухканальное переключение и переключение в интервале строчного гасящего импульса. Оба метода схожи только в том, что объединение сигналов четырех головок осуществляется в два этапа (рис. 72). На первом этапе происходит объединение сигналов головок, находящихся друг против друга, в период отсутствия сигнала. На это отводится время 1 мкс. Этот первый (предварительный) переключатель может управляться сигналом тахогенератора. 0 ... 30 31 32 33 34 35 36 ... 57
|
