Раздел: Документация
0 ... 50 51 52 53 54 55 56 ... 117 Для реализации режима "Search", при котором обеспечивается юступ к нужному фрагменту программы, используются ключи ТМЗ и ТМ4. При нажатии кнопки "Search" командой микроконтроллера замыкается ключ ТМ1, что приводит к отключению схемы фазовой компенсации. Одновременно, в зависимости от выбранного направления вперед/назад, кратковременно замыкается один из ключей ТМЗ или ТМ4. При этом к инвертирующему входу ОУ1 будет приложен "ускоряющий импульс". Величину выходного напряжения, прикладываемого к катушке отслеживания дорожки записи, определяет ток подключаемого источника и значение сопротивления резистора номиналом 100 кОм на выводе 12. В связи с тем, что узел "линза фокусирующего объектива/катушки" обладает инерционностью, после размыкания ключа (т.е. после снятия "ускоряющего импульса") замкнется ключ ТМ7. Управляет этим ключом схема формирования команды подтормаживания. При замыкании ТМ7 к инвертирующему входу ОУ 1 через внутренний резистор 90 кОм будет приложен "подтормаживающий импульс", предотвращающий движение узла "линза/катушки" по инерции. Длительность обоих импульсов — порядка 300 мкс. Таким образом происходит скачок (прыжок) луча на соседнюю дорожку записи. Далее замыкается ключ ТМ1, и сигнал ошибки TF. поступает на вход сервосистем. Таким образом, серией импульсов "ycкopeниe/Iюдтopмaживallиe, можно последовательно выполнять скачки через N дорожек, находящихся в диапазоне захвата линзы объектива. Далее будет включена система позиционирования оптического блока, которая переместит его на один шаг в нужном направлении. Схема формирования сигнала подтормаживания обеспечивает "мягкое" включение сервосистемы, также когда оптический блок перемещается скачками по радиусу диска. На основании того, что фазовый сдвиг между огибающей RF-сигнала и сигналом TL составляет 180°, включением этой схемы отсекается ненужная часть сигнала ошибки ТН. Схема подтормаживания будет включена и при активизации сервосистемы отслеживания дорожки записи, т.к. из-за эксцентриситета CD необходимо плавное включение сервосистемы. Перемещение оптического блока вперед/назад организовано замыканием ключей ТМ5 и ТМ6. При этом к двигателю привода оптического блока (Sled motor) прикладывается напряжение, величина которого определяется током подключаемого источника, и величиной сопротивления внешнего резистора (120 кОм). Замыкание механического переключателя "Limit SW" будет свидетельствовать о том, что оптический блок подведен к внутреннему диаметру CD. "Низкий" уровень на выводе 22 приведет к формированию сигнала SSTOP, после чего питание с двигателя будет снято. Выходной усиленный сигнал ТА 0 подается на вывод 13, который соединен с входом драйвера фокусной катушки. Сигнал управления двигателем привода оптического блока снимается с вывода 16 и далее подается на вход драйвера двигателя. Команды управления Рассмотрим, как работают сервопроцессор с точки зрения его взаимосвязи с микроконтроллером, когда между двумя интегральными схемами происходит обмен данными. Сигналы MIRR и DFCT с выходов одноименных схем приходят на схему устройства сопряжения уровней: преобразователь уровней ТТЛ в ИИЛ. После преобразования они поступают в регистр данных ИИЛ. В регистр данных ИИЛ поступают также сигналы с выходов компараторов FZC и TZC и выходные сигналы компараторов LPF и HPF. Без информации о состояниях выходов этих электронных схем невоз- Таблица 6.4. Группы команд управления сервосистемами
Рассмотрим, как происходит управление сервосистемами командами микроконтроллера. Для этого выберем по несколько основных команд, принадлежащих группам $0Х - $2Х, и представим процессы, происходящие в схемах. Подобная организация управления применяется и в остальных сервопроцессорах данного производителя. Команды $0Х Команды $0Х относятся к управлению сервосистемой фокусировки. Появление их на выводе DATA определяется получением информации на запрос микроконтроллера о состоянии выхода компаратора FZC (т.е. на выводе SENS будет присутствовать сигнал FZC). Конфигурация бит (двоичных разрядов) имеет следующий вид:
можна работа процессора системы управления. Это означает, что отсутствие хотя бы одного из перечисленных сигналов приведет к блокировке всех систем. В подтверждение рассмотрим классический практический пример: двигатель вращения CD делает несколько попыток запуститься, после чего следует остановка и отсутствие реакции на нажатие кнопок на лицевой панели. Если контролировать этот процесс осциллографом на выводе FOK, то картинка имеет вид серии импуль-"сов, после чего устанавливается "низкий" уровень. Воспроизведение возможно только при наличии "высокого" уровня на выходе компаратора сигнала FOK. В данном случае захват базового сигнала FE, сформированного усилителем сигнала ошибки фокусировки, сервосистемой невозможен по причине недостаточного уровня EFM-сигнала (временные интервалы, сформированные компаратором FOK, недостаточны для активизации сервосистемы фокусировки). После этого отступления вернемся к теме управления сервосистемами. Микроконтроллер посылает сигнал запроса о состоянии выхода каждой из схем. Сигналы, хранящиеся в регистре данных, приводятся к уровням ТТЛ, после чего подаются на вывод SENS. Получая данные с вывода SENS, микроконтроллер знает о состоянии фокусировки луча на поверхности диска (сигнал FZC), положение луча на поверхности диска (сигналы MIRR и TZC), наличие дефекта (сигнал DFCT). Используя эту информацию, процессор системы управления с помощью соответствующих команд управляет работой сервосистем. Входные данные, поступающие с микроконтроллера на вход DATA, имеют восьмиразрядную структуру. Они представлены ниже в виде двух шестнадцатерич-ных цифр, в форме $ХХ, где X — шестнадцатеричная цифра от 0 до F. Согласно функциональной принадлежности, команды управления условно можно разделить на четыре группы. Команды, относящиеся к группам $0Х и $2Х, и непосредственно управляющие сервосистемами, перечислены в табл. 6.4. Группа команд $ЗХ управляет схемами регулировки баланса и усиления. ov 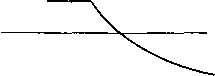 Рис. 6.23. Эпюра напряжения на выводе 8 при размыкании ключа FS1 Таким образом, попеременно подавая команды $02 и $03, можно сформировать пилообразный сигнал SERCH, необходимый в фазе поиска фокусировки (рис. 6.24). ов —, 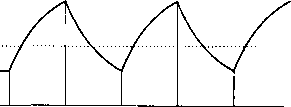 $ 00 02 03020302 Рис. 6.24. Формирование пилообразного напряжения поиска фокусировки Управляющий сигнал с вывода 11 (5) будет подаваться на вход микросхемы управления фокусной катушкой. Необходимо напомнить, что в этой фазе сигнал Управление четырьмя ключами FS1, FS2, FS4 и DFCT (см. рис. 6.21) осуществляется битами DO, Dl, D2, D3. С помощью ключей FS1 и FS2 происходит формирование пилообразного сигнала поиска фокусировки. Ключ FS4 служит для активизации сервосистемы автоматической фокусировки. Рассмотрим несколько примеров управления сервосистемой фокусировки по командам микроконтроллера. При сигнале FZC на выводе SENS в разрядах D7, D6, D5 и D4 — всегда "низкий" уровень, поэтому будем рассматривать только значение битов D3, D2, D1 и DO, которые управляют ключами. Команда $00: D3 D2 Dl DO 0 0 0 0 Все ключи разомкнуты. На выводе 8 присутствует напряжение (22 мкА -11 мкА) х 50 кОм = 0,55 В. На выводе 6 напряжение равно 0 В. Команда $02: D3 D2 Dl D0 0 010 Ключи FS4, FS3 и FS1 разомкнуты, ключ FS2 замкнут. На выводе 6 присутствует отрицательное напряжение, численно равное (22 мкА - 11 мкА) х 50 кОм х (сопротивление между выводами 6 и 7): 50 кОм. Команда $03: D3 D2 Dl D0 0 0 11 Ключи FS4 и FS3 разомкнуты, ключи FS2 и FS1 замкнуты. Внешний конденсатор, подключенный к выводу 8, начинает разряжаться, и напряжение на выводе уменьшается (рис. 6.23). Постоянная времени определяется внутренним резистором сопротивлением 50 кОм и емкостью 4,7 мкФ внешнего конденсатора. 0 ... 50 51 52 53 54 55 56 ... 117 |












