Раздел: Документация
0 ... 26 27 28 29 30 31 32 ... 56
Рис. 59. Датчики и исполнительные элементы систем автоматического регулирования видеомагнитофона: 1 — двигатель блока вращающихся головок; 2 — его тахогенератор; 3 — ведущий двигатель; 4 — тахогенератор ведущего двигателя; 5 — головка записи-воспроизведения сигнала управления; 6 — двигатель подающего узла; 7 — датчик натяжения ленты со стороны подающей катушки; 8 — двигатель приемного узла; 9 — датчик натяжения ленты со стороны приемной катушки на электромеханический преобразователь, который перемещает головку вдоль оси барабана. Естественно, что не все видеомагнитофоны оснащены всеми перечисленными здесь датчиками и исполнительными механизмами. Конструкция аппарата зависит от требований, предъявляемых к нему и от требуемых режимов работы. В качестве тахогенератора применяются магнитные и оптические датчики. Наиболее простой сигнал управления вырабатывают системы с вращающимся магнитом. Магнит, прикрепленный к вращающемуся валу, за каждый оборот индуцирует импульс в неподвижной обмотке. Магнит и видеоголовки устанавливаются на барабане в определенном положении друг относительно друга, следовательно, импульс характеризует определенное положение головок. Естественно, что информация о положении головок может быть получена и с помощью других средств (например, оптических). Точность регулирования может быть повышена, если за единицу времени неоднократно получать информацию о движении. Таким образом, целесообразно, например, увеличить число магнитов. Для этого необходимо использовать оптические диски с точной угловой градуировкой, а также вращающиеся зубчатый или перфорированный датчики. Для всех существует одна проблема — точность градуировки диска. Она должна быть на порядок выше точности работы датчика. Система автоматического регулирования воспринимает погрешность диска как погрешность регулируемого параметра и воздействует таким образом, чтобы снизить ее. Следовательно, погрешность датчика приводит к неправильной установке регулируемого параметра. Регулирование барабана видеоголовок всегда есть регулирование углового положения. Взаимосвязь между сигналом тахогенератора и угловым положением вращающегося барабана видеоголовок должна быть однозначной. В случае формирования одного управляющего импульса за один оборот таходатчика такая взаимосвязь существует, однако в этом случае необходимо вводить определенную асимметрию (рис. 60). Внешняя часть диска, показанная на рисунке, служит для грубой подстройки при пусковом ускорении и одновременно подводит барабан к определенному месту для точной под- рис. 60. Рисунок диска оптического тахогенера-тора, наносимый на стекло, закрепленное на оси. Свет, прошедший через стекло, воздействует на фототранзистор. Диск имеет два типа насечек. На внешней стороне диска находится один, отличающийся от трех других более широкий вырез, с помощью которого можно получить информацию об определенном положении барабана блока вращающихся головок. На внутренней стороне диска нанесены 125 одинаковых прорезей [108] стройки. В пределах определенного диапазона скоростей вращения барабана после установления стабильной скорости движения система автоматического регулирования скоростного двигателя переключается на внутреннюю часть диска [108]. Набор исполнительных элементов также достаточно широк. Из ранних разработок следует упомянуть синхронный двигатель, управляемый генератором с регулируемой частотой, электромагнитный тормоз, диск которого благодаря возникновению вихревых токов позволяет менять число оборотов или угол приводного вала (асинхронного двигателя). В новых устройствах в первую очередь применяют разнообразные двигатели постоянного тока, обладающие малой инерционностью. Широкое распространение получили также двигатели с электронной коммутацией. Подробное рассмотрение элементов систем автоматического регулирования видеомагнитофонов заняло бы слишком много места, поэтому здесь будет затронута только одна тема. Во многих случаях сигнал рассогласования в системе автоматического регулирования формируется с помощью фазового дискриминатора (рис. 61), который вырабатывает постоянное напряжение, пропорциональное в широких пределах относительному временному сдвигу 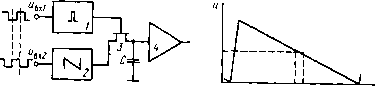 Рис. 61. Фазовый дискриминатор: а — принципиальная схема (из входного сигнала ивх 1 с помощью ждущего мультивибратора 1 формируется короткий импульс, а из входного сигнала ивх 2 с помощью специального формирователя 2 — пилообразный сигнал; транзисторный ключ 3 открывается в момент прохождения короткого импульса и пропускает пилообразный сигнал, Достигший к этому моменту некоторого уровня, до которого и заряжается конденсатор С; усилитель 4 имеет высокое входное сопротивление) ; б — напряжение на конденсаторе С являющееся линейной функцией разности фаз сигналов 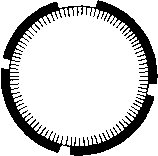 между двумя входными сигналами. Статические и динамические характеристики системы автоматического регулирования, построенной на базе данного фазового дискриминатора, лучше, чем у систем, построенных на других фазовых дискриминаторах [41]. Системы автоматического регулирования скоростного двигателя и скорости движения ленты С помощью простых преобразований можно показать, что взаимосвязь между длиной строчки записи и скоростью движения ленты в уравнениях (66) и (67), а также условие необходимого расположения импульсов строчной синхронизации [69] определяются отношением vn/vr, а не в отдельности уг и ил. Это означает, что для поддержания требуемой геометрии строчек записи необходимо установить отношение ул/уг равным заданному значению и поддерживать это равенство при записи и воспроизведении. В процессе записи, учитывая, что нет необходимости иметь информацию о реальной скорости движения ленты, задачей системы автоматического регулирования является обеспечение постоянного во времени отношения vn/vr. Это может быть достигнуто только за счет синхронизации вращения ведущего вала и барабана блока вращающихся головок. Вместе с тем необходимо обеспечить и то, чтобы кадровые синхроимпульсы располагались на прямой линии, параллельной продольной оси ленты. Для этого скорость вращения барабана блока вращающихся головок должна быть синхронизирована кадровыми синхроимпульсами, выделенными из входного телевизионного сигнала. Поскольку нельзя воздействовать на реальное перемещение ленты, которое определяется изменяющимся случайным образом скольжением на ведущем валу под действием изменяющегося натяжения ленты, на ленту необходимо записать сигнал управления, который при воспроизведении позволяет повторить условия движения головки при записи. На рис. 62 представлены два варианта структурной схемы системы автоматического регулирования скорости вращения барабана блока вращающихся головок и ведущего вала в режиме записи. В первом варианте (сплошные линии) в качестве опорного сигнала системы автоматического регулирования скорости вращения барабана блока вращающихся головок используются кадровые синхроимпульсы. Скорость вращения ведущего двигателя синхронизируется сигналами тахогенератора блока вращающихся головок, отражающими реальную скорость вращения барабана видеоголовок, и эти же сигналы записываются в качестве сигналов управления. Такой метод применяется в системах поперечно-строчной записи. Во втором варианте (штриховые линии) опорным сигналом систем автоматического регулирования являются импульсы кадровой синхронизации, и этот же сигнал записывается на ленту как сигнал управления. Данное решение используется в наклонно-строчных системах записи. Естественно, что оба варианта однозначны в случае идеального регулирования. Требования, предъявляемые к системам автоматического регулирования при воспроизведении, зависят от способа использования видеомагнитофона. Рассмотрим сначала тот случай, когда видеомагнитофон — это самостоятель-оп 0 ... 26 27 28 29 30 31 32 ... 56 |
|||||||||||||||












