Раздел: Документация
0 ... 18 19 20 21 22 23 24 ... 34 Таблица 6.1. Значения коэффициентов н gt для различных типов магнитопровода
шения тж, пж, ек с учетом слабых ограничений по физической реализуемости: тж0, ик0, вк1. Остальные ограничения учитывались при определении оптимальных значений Вт и /, минимизирующих множитель А. Таблица 6.2. Значения параметра минимизации X
Рис. 6.1. Зависимость оптимальных коэффициентов тх опт, пх ОПТ, Е1с.опт от параметра минимизации X ОМ 2W
О 0 0,5 Ifi \5 2,0 2,5 X Исследования показали, что невозможно спроектировать дроссель, оптимальный сразу по нескольким экономическим показателям. Например, дроссель с минимальными потерями будет иметь увеличенный объем, и наоборот, а дроссель с минимальной стоимостью активных материалов не обладает минимальными массой и объемом. В [6.6] приведены зависимости тж опт, ик,опт,от параметра минимизации X для рассмотренных ранее типов дросселей, которые были получены при минимизации множителя g на ЭВМ БЭСМ-4. На рис. 6.1 приведена зависимость тж опт, и,>0П1 и екопт для дросселя с магнитопроводом типа П2. Из табл. 6.1 видно, что параметры go6 и gcr не зависят от технологических коэффициентов К3 и Км, и это позволяет получить единые кривые для оптимальных значений безразмерных величин тж, пк, ек, не зависящие от К3 и Км. 6.2. УЧЕТ ОГРАНИЧЕНИЙ ПО НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ ДРОССЕЛЯ Для оптимизации целевой функции 0 необходимо минимизировать множитель А, что может быть достигнуто при увеличении максимальной магнитной индукции Вт и плотности тока /. Однако в стартерных схемах с ростом Вт в рабочем режиме увеличиваются пусковой ток лампы /пуск и ток режима односторонней проводимости I , возрастают колебания тока лампы при допустимых колебаниях напряжения питания и коэффициент амплитуды тока лампы К, а также содержание высших гармоник в общем потребляемом токе. Эти параметры ограничивают допустимую нелинейность характеристики дросселя и тем самым ограничивают Вт в рабочем режиме. Проведенный анализ показал, что наиболее жесткими являются ограничения по / и /ан, а затем уже ограничение по нестабильности работы лампы и др. В соответствии с [6.7] при колебаниях питающего напряжения и, следовательно, при допустимых изменениях напряжения на дросселе идр>пусжтЫГУдр<идРгПусжтах пусковой ток тоже должен находиться в определенных пределах: 4yCKmin/„yCK 1щс*тах- Вводя коэффициенты кратности пускового напряже-ния „Уск=др,„Уск/др(6.20) и пускового тока Я/пуск = 4ускД(6-21) ограничение по пусковому току можно записать в виде ту ту ту TfТТТ1И1С*С 1С*С *V пуск minпуск I пуск max -"-/авпри-"-I/пуск min -"-I/пуск ч/пуск ma*= А[/ав. Ограничение по току аномального режима имеет аналогичный вид. Ограничение при колебаниях питающего напряжения в рабочем режиме KjIJI(6.22) при Кираб = др,рабтах/ др>(6.23) где Imax и Uap>pa6max—максимально допустимые значения тока и напряжения на дросселе в рабочем режиме. Таким образом, все рассмотренные ограничения по нелинейности имеют одинаковый вид: KIJI при Uapl/U„ = Km.(6.24) Расчет следует вести по самому жесткому ограничению. Если наиболее жесткое ограничение не очевидно, то необходимо провести расчет с учетом нескольких ограничений по нелинейности. В соответствии с законом полного тока wi=HJcr + HJB,(6.25) или щ = Яст(Дт)/С1 + Дв/в/ц0.(6.26) Выражение (6.26) с помощью метода переменных коэффициентов (см. гл. 3) может быть преобразовано в уравнение для эквивалентных синусоид [6.8]: r> 0,554gti3KN(Bn, Kv) где Щвт, jg=i!° [H3m(KvBm)-KvH3m{Bm)yi\ (6.28) В (6.28) Нэт~амплитуда эквивалентной синусоиды напряженности магнитного поля в стали магнитопровода, которая может быть легко найдена по характеристике намагничивания Вт=/(Яэт). Зависимости N[Bm, Kv) были рассчитаны для разных электротехнических сталей и приведены в 128 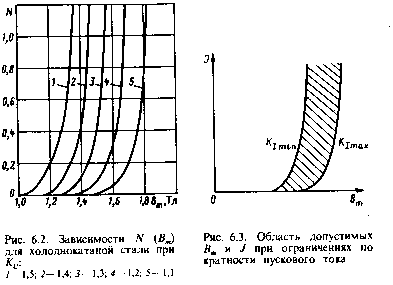 РТМ 16.682.043-74. На рис. 6.2 показаны зависимости N(Bm, Kv) для холоднокатаной стали. Аналогично выглядит ограничение по минимальной кратности тока дросселя: I,/I>Kn при.идр1/идр=Кт.(6.29) Область допустимых значений Вт и /, обеспечивающих выполнение ограничений по максимальной и минимальной кратностям тока дросселя, приведена на рис. 6.3. 6.3. УЧЕТ ОГРАНИЧЕНИЙ ПО ПОТЕРЯМ В ДРОССЕЛЕ Потери мощности в дросселе складываются изпотерь в обмотке, Вт, P« = W«P«J2(6,30) и потерь в магнитопроводе, Вт, Pcr = vCTyCTpuolfBl(6.31) При конструировании ПРА потери мощности в дросселе по экономическим соображениям должны быть ограничены, т. е. др = Л>б + Р сг Рдр, доп-(6.32) Уравнение для границы области Вт и / при ограничении по допустимым потерям получим при подстановке независимых 129 параметров тк, пк, ек, Вт, J в (6.32): 11/4-3/4 £ , p2JVM лз боб g3/4 D5/4 5/4 (6.33) где F2 =- 1 ДОП р1 * др.доп (6.34) (6.35) (1/лр//АфУ)3/2ГобРоб7с1Р1,0// Р = (Уст1,0///УобРоб)1/4- Выражение (6.33) в плоскости Вт, J представляет собой замкнутую область (рис. 6.4), в которой наибольшие значения Вто и Л> могут быть определены как fimO = 530P доп i KKgg;(6.36) Jo = OFlonPKKgg.(6.37) Уравнение(6.33) в относительных величинах Вт/Вт0 и J/J0 запишется в виде {JIJo)5l4l{BJBm0)+{BJBm0)l{JIJ0f4 = 1,9305. (6.38) Уравнение (6.38) протабулировано • в РТМ 16.682.043-74. Из (6.33) следует, что рост Рдр доп приводит к резкому увеличению допустимых Вт и /. При А,Р]ДОП->0 область допустимых Вти J плавно стягивается к нулю, что свидетельствует о возможности создания дросселя со сколь угодно малыми потерями, однако размеры такого дросселя будут очень велики. Наилучшими экономическими показателями обладает дроссель с произведением (BmJ)max, так как оно входит в знаменатель 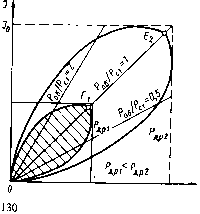 Вт0 Вт Рис. 6.4. Область допустимых Вт и J при ограничении по допустимым потерям в дросселе выражения для коэффициента А. Максимум произведения при ограничении по потерям достигается на границе области в точке Е(Е1 или Е2 в зависимости от Рдр). На рис. 6.4 показаны линии равных отношений РоЪ1РСТ. Потери мощности в обмотке и магнитопроводе равны на оси симметрии. Выше оси преобладают потери в обмотке, ниже — потери в стали. При увеличении полной мощности дросселя S = Uд / потери в дросселе растут пропорционально SlP4, т. е. Рдр~5др4. 6.4. учет ограничений по температурному режиму дросселя Во многих случаях основным режимом, определяющим размеры и стоимость ПРА, является его тепловой режим. Дроссель минимальной массы удается получить в том случае, когда его обмотка и магнитопровод имеют предельно допустимые температуры. Температура обмотки дросселя не должна превышать максимально допустимого значения, определяемого с учетом срока службы ПРА, оговоренного в ГОСТ 16809-78. Это ограничение накладывается в виде допустимого среднего превышения температуры обмотки дросселя А То5 над температурой окружающего воздуха. Дроссели, применяемые в ПРА, обычно работают в двух режимах: рабочем и наиболее тяжелом аномальном. В рабочем режиме А Гра6 выбирается с учетом обеспечения длительной работоспособности изделия (срок службы изоляции обмоточного провода не менее 10 лет). В аварийном режиме оговаривается допустимая длительность работы ПРА (не более 20 или 40 сут в зависимости от продолжительности испытаний соответственно 30 или 60 сут). Это обеспечивается при условии АГав*(1,5-2,5)АГра6.(6.39) В ПРА наиболее нагретым элементом является катушка дросселя, которая из-за неоднородной структуры нагревается неравномерно по всему объему. Поэтому при расчетах определяют среднее значение ее температуры. Таким образом, превышение температуры обмотки дросселя имеет две составляющие: Д7\ — перепад между средней температурой обмотки и средней температурой поверхности дросселя и А Т2 — перепад температуры между поверхностью дросселя и окружающим воздухом. Величина А Т2 зависит от выделяемой дросселем мощности Рпр, площади его открытой поверхности S0TKp и эффективного коэффициента теплоотдачи аэф, т. е. AT2 = Papl(<x3ilSorKp).(6.40) Коэффициент аЭф зависит от многих факторов: температуры поверхности ПРА, материала и условий теплоотдачи корпуса 0 ... 18 19 20 21 22 23 24 ... 34 |












