Раздел: Документация
0 ... 7 8 9 10 11 12 13 ... 27 тора Ra необходимо задаться максимальным тормозным моментом Мт или током /т, который обычно принимают не более (2-т-3)Мн или (2-т-3)/н: ГЦ /тл„ /н мт где пт — частота вращения дзигателя з начале торможения. Пример 17 Для двигателя примера 15 рассчитать сопротивление резистора динамического торможения, исходя из того, чтобы пик тока якоря при торможении был равен 2/„. Решение Сопротивление резистора динамического торможения получают, предполагая, что двигатель работал с номинальной частотой вращения, т. е. я, = 1500 об/мин: пт Ua1500 220 R*" ~t Т7~Кя ~ W • Ш-~°034 " °603 0м- Пример 18 Для двигателя примера 15 рассчитать резистор противовклю-чения по условию, чтобы пик момента при протизовключенин МТ=2МН. Решение Сопротивление секции резистора Мп „ „ „ 220 20,8 **=217-*"-*n=2W-w-0-034- — 0,491 =0,775 Ом. § 9. Асинхронные электродвигатели На практике для построения механических характеристик асинхронных двигателей применяются расчеты по экспериментальным и паспортным данным. В этих случаях должны быть иззестны Рн; I»; UH\ п»; cos фн; г]н. Механическая характеристика строится для рабочей части по двум точкам. 1-я точка: М—0; n=ni~60f/p, где f — частота питающего тока, Гц; р — число пар полюсов обмотки статора; П[ — синхронная частота вращения, об/мин; 2-я точка: п—Па, Л*=AfH=9550 (Рн/пя). По уравнению механической характеристики м = 2MK(l+gsK)j или SK — -f 2<?sK М =--,(2) sKS где Мк — максимальный момент, раззизаемын двигателем (определяется по каталогу или по формуле); М — значение момента дзигателя при скольжении s; q—rjr — учитывает падение напряжения в ста-торной цепи; л, — активное сопротивление обмотки статора; г2 — сопротивление ротора, приведенное к статору; s„ — максимальное скольжение, при котором двигатель развивает максимальный момент Мк. Далее, задаваясь скольжением s от 0 до 1, по формулам (1) или (2) строится механическая характеристика дзигателя. Для крупных машин, у которых сопротивлением Г\ можно пренебречь, механическую характеристику можно строить по упрощенной формуле (2). Максимальное скольжение можно определить: 1) по параметрам машины sK = ± + {*i + b)a где Xj— индуктивное сопротивление обмотки статора; х2—индуктивное сопротивление обмотки ротора, приведенное к статору; 2)по упрощенному соотношению sK=5sH, где sH — = (tii—nH)//ti — номинальное скольжение; 3)по приближенной фор МуЛб Sk — 5ц где К—Мк/Ми — перегрузочная способность двигателя (принимается по паспорту или каталогу). Момент асинхронного дзигателя прямо пропорционален кзадрату напряжения Мг=[/2. Поэтому для построения механической характеристики при изменении напряжения нужно критический Мк и пусковой Мп моменты изменить пропорционально кзадрату изменения подзодимого напряжения. Механическая характеристика дзигателя, построенная по уразнению (1), призедена на рис. 14. 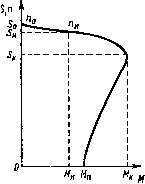 Рис. 14. Механическая характеристика асинхронного двигателя Пусковые устройства Двигатели с фазным ротором. Пуск з ход асинхронных электродвигателей с фазным ротором производится с помощью резистора, включенного в цепь ротора (рис. 15,а). Это уменьшает начальный пусковой ток и позволяет получить пускозой момент, близкий к максимальному моменту дзигателя. Ступени пускового резистора могут служить также для регулирования частоты вращения двигателя. В этом случае пускоре-гулирующие резисторы должны зыдерживать без опасного для них нагреза достаточно длительное зключение. Рассчитызают эти резисторы дзумя способами: графическим и аналитическим. Графический метод оснозан на прямолинейности механических характеристик и аналогичен расчету для двигателей постоянного тока параллельного возбуждения. Вначале строится рабочая часть механической характеристики з соответствии с § 8. Далее, задаваясь максимальным Mi и переключающим М2 пусковыми моментами дзигателя, строят пускозые характеристики дзигателя (рис. 15,6). Для асинхронных электродвигателей обычно принимают Mi = (180+-250) % от М„; М2= (110-Ы20) % от Мн, где Мн — номинальный момент дзигателя, который в данном случае принимается равным нагрузочному Мс, т. е. М„=МС. Отрезок аб между горизонтальной прямой п\а и ес- 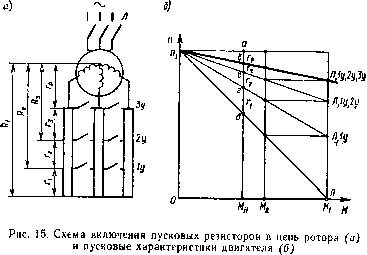 тестзенной механической характеристикой щб соответствует внутреннему активному сопротивлению, Ом, обмотки ротора гр: 100 Я р.н> где sH — номинальное скольжение электродзигате-теля, %; Яр.п— активное сопротивление неподвижного ротора, Ом. р.н ■--- 1,73/р.н где /р.„ — номинальный ток ротора, А; £р.н — ЭДС между кольцами неподвижного разомкнутого ротора, В. Электродвижущую силу между кольцами замеряют с помощью зольтметра при заторможенном роторе или принимают по каталогу. Отрезок дг з масштабе сопротивлений дает величину перзой секции пускового резистора. Отрезки дг, гв н т. д. соотзетстзуют сопротивлениям отдельных секций пускового резистора в порядке их замыкания. Масштаб для сопротивлений, Ом/мм, тс=гР!аб, При аналитическом расчете необходимо помнить, что для асинхронных дзигателей обычно принимают три—пять ступеней ускорения. Если число ступеней неиззестно, то их можно определить 10 000 mJl sa о/о Мг % . lg Л. где т— число ступеней резистора; Mi — максимальный пускозой момент электродвигателя, % номинального; sH — номинальное скольжение электродвигателя, %; X = М(/М2 — отношение максимального пускового момента к переключающему. Если число ступеней резистора известно, то X можно определить по следующим формулам: для нормального режима пуска (задаемся моментом М2) , т+1/ 10000 х = у sH % Mt % для форсированного режима пуска (задаемся моментом Mi) % =. 1"/" 10000 Сопротивление отдельных секций резистора каждой фазы r3 = rp(l—1); г2—ГгХ\ Гг—г2Х. Пример 19 Определить аналитическим способом сопротивление пускового резистора электродвигателя мощность» 7,4 кВт с частотой вращения я2=955 об/мин, если номинальный ток в рОторе /Рн = = 53 А. Электродвижущая сила между кольцами неподвижного разомкнутого ротора £,ря=94,5 В, а номинальный момент Мн = =77,1 Н-м. Частота вращения поля статора n( = 1000 об/мин. Нагрузочный момент механизма Л1С=72 Н-м. Режим пуска форсированный. Решение 1.Принимают пусковой резистор, состоящий из трех ступеней сопротивления. 2.Номинальное скольжение электродвигателя л,—л2 1000 — 955 3 Отношение максимального пускового момента к переключающему если принять Afi = 200 % от Ма. 4.Номинальное сопротивление ротора электродвигателя Ерн94,5 ■ттз-103 0"- 5.Внутреннее активное сопротивление ротора Гр = ~№ R*H= 1оТ 1 03 = 0,0463 °М- 6.Сопротивление отдельных секций резистора на фазу гь= =гр (%— 1) = 0,463 (2,23— 1) = 0,06 Ом; г2=г3Х= 0,06• 2,23=0,127 Ом; г, = г2Л,=0,127■ 2,23 = 0,283 Ом. Первая секция сопротивления резистора 0,283 Ом, вторая — 0,127 Ом, третья — 0,06 Ом. Стандартные сопротивления секций пусковых резисторов можно определить из справочной литературы. Выбранное стандартное сопротивление резистора не должно отличаться от расчетного более чем на ±10 %. Двигатели с короткозамхнутым ротором. Пускозой ток короткозамкнутого электродвигателя достигает 5—8-кратиой величины номинального тока. При маломощной сети толчки тока зызывают значительное падение напряжения и тем самым отрицательно злияют на работу других приемникоз. Практически короткозамкнутые двигатели мождо пускать з ход следующими способами: прямым включением в сеть на полное напряжение; переключением при пуске обмотки статора со ззез-ды на треугольник; взедением при пуске з цепь статора активных и реактивных резисторов; взедением при пуске з одну фазу статора активного резистора; с помощью автотрансформатора. Прямое зключенне дзигателя на полное напряжение сети обеспечивает максимальный пусковой момент, но связано со значительными пусковыми токами, которые могут вызвать в сетях большие падения- напряжения. Падение напряжения в сети, в сзою очередь, зазисит от соотношения между мощностями пускаемого в ход двигателя и питающего его трансформатора. В связи с этим предельную мощность двигателя с короткозамкпутым ротором можно принимать по табл. 23. 0 ... 7 8 9 10 11 12 13 ... 27 |












