Раздел: Документация
0 ... 31 32 33 34 35 36 37 ... 117 CXA1082AS/BS 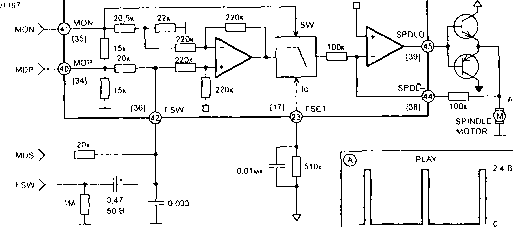 7,5 мкс Рис. 4.42. Схема формирования АЧХ системы CLV Команды управления Рассмотрим как работает сервопроцессор с точки зрения его взаимосвязи с микроконтроллером, когда между двумя интегральными схемами происходит обмен данными. Сигналы FOK, MIRR, DFCT с выходов одноименных схем поступают на схему устройства сопряжения уровней — преобразователь уровней ТТЛ в ИИ Л. После преобразования они поступают в регистр данных ИИЛ. В регистр данных ИИЛ приходят также сигналы с выходов компараторов FZC и TZC и схемы формирования сигнала SSTOP. Без информации о состояниях выходов этих электронных схем невозможна работа процессора системы управления. Это означает, что отсутствие хотя бы одного из перечисленных сигналов приведет к блокировке всех систем. В подтверждение приведем классический пример из практики: двигатель вращения CD делает несколько попыток запуститься, после чего следует остановка и отсутствие реакции на нажатие кнопок на лицевой панели. Если контролировать этот процесс осциллографом на выводе FOK, то картинка имеет вид серии импульсов, после чего устанавливается "низкий" уровень. Воспроизведение возможно только при наличии "высокого" уровня на выходе компаратора сигнала FOK. В данном случае захват базового сигнала FE, сформированного усилителем сигнала ошибки фокусировки, сервосистемой невозможен, по причине недостаточного уровня EFM-сигнала (временные интервалы, сформированные компаратором FOK, недостаточны для активизации сервосистемы фокусировки). После этого отступления вернемся к теме управления сервосистемами. Микроконтроллер посылает сигнал запроса о состоянии выхода каждой из схем. Сигналы, хранящиеся в регистре данных, приводятся к уровням ТТЛ, после чего подаются на вывод SENS. Получая данные с вывода SENS, микроконтроллер знает о состоянии фокусировки луча на поверхности диска (сигналы FOK и FZC), положении луча на поверхности диска (сигналы MIRR и TZC), наличии дефекта (сигнал DFCT). Присутствие сигнала SSTOP сообщит микроконтроллеру не только о том, что требуется выключить двигатель позиционирования, но и о необходимости включения поиска фокусировки. Используя эту информацию, процессор системы управления с помощью соответствующих команд управляет работой сервосистем. Входные данные, поступающие от микроконтроллера на вход DATA, имеют 8-разрядную структуру, однако ниже они представлены в виде двух шестнадцатерич-ных цифр в формате $ХХ, где X — шестнадцатеричная цифра от 0 до F. Согласно функциональной принадлежности, команды управления условно можно разделить на восемь групп. Команды, относящиеся к группам $0Х...$2Х и непосредственно управляющие сервосистемами, указаны в табл. 4.5 (управление FS1-4, TG1-2, ТМ1-7 см. рис. 4.47). Таблица 4.5. Команды, управляющие сервосистемами
Группа команд $ЗХ (управление PS1-3) задает размер шага и скорость при перемещениях оптического блока вперед/назад и режим фазы "Поиск фокуса". Группа команд $4Х управляет секвенсером — процессором, задающим последовательность выполнения инструкций сервопроцессором. Группа команд $5Х...$7Х задает длительности импульсов ускорения и подтор-маживания при скачке на соседнюю дорожку, а также при скачках через 10 дорожек, через N дорожек и при перемещениях оптического блока. Рассмотрим как происходит управление сервосистемами с помощью команд микроконтроллера. Для этого выберем по несколько основных команд, принадлежащих группам $0Х...$2Х, и представим процессы, происходящие в схемах. Подобная организация управления применяется и в остальных сервопроцессорах, которые будут описаны ниже. Команды $0Х Команды $0Х относятся к управлению сервосистемой фокусировки. Появление их на выводе DATA определяется получением информации на запрос микроконтроллера о состоянии выхода компаратора FZC (т.е. на выводе SENS будет присутствовать сигнал FZC). Структура команд $0Х имеет следующий вид:
Управление четырьмя ключами FS1...FS4 (см. рис. 4.38) осуществляется битами DO, Dl, D2, D3. С помощью ключей FS1 и FS2 происходит формирование пилообразного сигнала поиска фокусировки. Замыканием ключа FS3 обеспечивается ос-, лабление усиления высокочастотной составляющей сигнала ошибки фокусировки. Ключ FS4 служит для включения сервосистемы автоматической фокусировки. Рассмотрим несколько примеров управления сервосистемой фокусировки по командам микроконтроллера. При сигнале FZC на выводе SENS в разрядах D7, D6, D5 и D4 всегда "низкий" уровень, поэтому будем рассматривать только значение битов D3, D2, D1 и DO, которые управляют ключами. ов 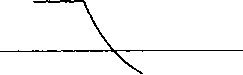 Рис. 4.43. Эпюра напряжения на выводе 13 (7) при размыкании ключа FS1 Таким образом, попеременно подавая команды $02 и $03, можно сформировать пилообразный сигнал SERCH, необходимый в фазе поиска фокусировки (рис. 4.44). о в —, 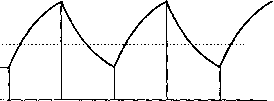 $ 00 02 03020302 Рис. 4.44. Формирование пилообразного напряжения поиска фокусировки Управляющий сигнал с вывода 11 (5) будет подаваться на вход микросхемы управления фокусной катушкой. Необходимо напомнить, что в этой фазе сигнал с выхода усилителя FE не поступает на вход схемы фазовой компенсации сервосистемы фокусировки, т.к. ключ FS4 замкнут. Для лучшего понимания процессов, связанных с фокусировкой луча, остановимся на них подробнее. Тем более, что подавляющее большинство неисправностей проигрывателей компакт-дисков связаны именно с невозможностью правильной фокусировки. Пусть полярность сигнала соответствует показанной на рис. 4.45. Команда $00: D3 D2 Dl DO 0 0 0 0 Все ключи замкнуты. На выводе 13 (7) (см. рис. 4.38) присутствует напряжение (22 мкА - 11 мкА) х 50 кОм = 0,55 В. На выводе 11 (5) напряжение равно 0 В. Команда $02: D3 D2 Dl D0 0 0 10 Ключи FS4, FS3 и FS1 замкнуты, ключ FS2 разомкнут. На выводе 11 (5) присутствует отрицательное напряжение, численно равное (22 мкА - 11 мкА) х 50 кОм х (сопротивление между выводами 11 (5) и 12 (6)): 50 кОм. Команда $03: D3 D2 Dl D0 0 0 11 Ключи FS4 и FS3 замкнуты, ключи FS2 и FS1 разомкнуты. Внешний конденсатор, подключенный к выводу 13 (7), начинает разряжаться, и напряжение на выводе 13 (7) уменьшается (рис. 4.43). Постоянная времени определяется внутренним резистором сопротивлением 50 кОм и емкостью 4,7 мкФ внешнего конденсатора. 0 ... 31 32 33 34 35 36 37 ... 117 |












