Раздел: Документация
0 1 2 3 4 ... 143 адаптивные системы, обеспечивающие стабилизацию динамических свойств автоматических систем и их показателей качества при изменении параметров объектов и характеристик входных воздействий; системы автоматической оптимизации (экстремальные системы), осуществляющие автоматический поиск и поддержание экстремального значения критерия качества; импульсные и цифровые автоматические системы, обеспечивающие преобразование сигналов в соответствии со сложными алгоритмами управления и, благодаря этому, позволяющие достигать высоких точностей процессов управления. Созданы теории чувствительности и распознавания образов, разработан универсальный метод исследования САУ — метод пространства состояний. Методы исследования, разработанные в теории автоматического управления, являются довольно общими, область применения их выходит за рамки практического приложения дисциплины. Принципы управления (регулирования), на основе которых строятся технические системы, имеют универсальный характер. Аналогичные принципы, например принцип обратной связи, заложены в регуляционные системы живых организмов, системы управления производством, обществом ит. д. Поэтому изучение теории автоматического управления и регулирования в настоящее время становится необходимым не только для специалистов в области автоматики, но и для широкого круга специалистов других направлений. Второе издание существенно переработано и дополнено новыми главами, в которых рассматриваются цифровые, оптимальные и адаптивные автоматические системы, включены научные результаты, полученные автором в области коррекции систем автоматического управления, теории инвариантности и ее применения для построения высококачественных комбинированных систем, теории импульсных, оптимальных по быстродействию систем автоматического управления и др. При. изложении материала предполагалось, что студенты ознакомлены о определенными разделами высшей математики, теоретических основ электротехники, вычислительной техники, а также с элементами автоматики из курсов электрических машин, электронных устройств. Основные понятия и определения. Принципы управления - • 1.1. Определение системы автоматического управления (САУ) Состояние любого технического устройства характеризуется одной или несколькими физическими величинами. Например, состояние генератора характеризуется величиной напряжения и значением частоты этого напряжения, двигателя — угловой частотой вращения его вала, закалочной печи — температурой, антенны радиолокационной станции — угловым положением, ракеты — координатами траектории полета. Впредь технические устройства будем называть объектами, а физические величины, характеризующие их состояние,— выходными величинами объектов. На практике выходные величины объектов должны удовлетворять определенным требованиям. Совокупность предписаний, определяющих характер изменения выходных величин объектов, называется алгоритмом функционирования. К наиболее часто встречающимся на практике алгоритмам функционирования относятся следующие: поддержание постоянства выходной величины (3 (t), равной заданному (требуемому) значению ртр (t); изменение выходной величины по заданному закону (программе); изменение выходной величины по заранее неизвестному закону. Например, обычно необходимо, чтобы напряжение генератора, частота этого напряжения, частота вращения ротора двигателя поддерживались постоянными, равными требуемым значениям. Траектория полета ракеты должна изменяться по определенной, заранее разработанной программе. Антенна радиолокационной станции должна изменять угловое положение таким образом, чтобы ось равносиг-нальной зоны была направлена на цель, координаты которой изменяются произвольно. Таким образом, выходную величину объекта р" (t) необходимо поддерживать равной требуемому значению Ртр (t), т. е. (3 (t) = ртр (t), которое является постоянной величиной или же изменяется по некоторому, в общем случае неизвестному закону. Для того чтобы выходная величина р (t) объекта (рис. 1.1) приняла требуемое значение, на его вход подается входное воздействие p. (t). На рис. 1.2, а представлена принципиальная схема системы электропривода, состоящего из электромашинного усилителя мощности (ЭМУ) и электродвигателя постоянного тока М. В этой системе электродвигатель является объектом, а частота вращения п его ротора — выходной величиной. Чтобы ротор электродвигателя вращался с требуемой частотой птр, необходимо на его вход (якорную обмотку) подавать опреде-
Рис. 1.1, Схема объекта и воздействий. 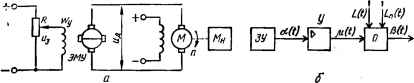 Рис. 1.2. Схемы системы электропривода, состоящей из электромашинного усилителя мощности ЭМУ и электродвигателя М: а — принципиальная; б — функциональная. ленное напряжение ud. Это напряжение снимается с выхода ЭМУ. В свою очередь, на обмотку управления Wy ЭМУ подается напряжение ы3 с движка потенциометра R. При перемещении этого движка изменяется ток в обмотке Wy ЭМУ и напряжение ий, т. е. изменяется входное воздействие объекта. Последнее вызывает изменение выходной величины объекта — частоты вращения ротора. Для задания требуемой частоты вращения ротора двигателя движок потенциометра R устанавливается в соответствующее положение. Поэтому потенциометр R называют задающим устройством. В дальнейшем, наряду с принципиальными, мы будем сталкиваться с функциональными схемами систем. Функциональная схема представляет собой схему соединения элементов, различаемых по их функциональному назначению. Функциональная схема электропривода ЭМУ — электродвигатель изображена на рис. 1.2, б, где ЗУ — задающее устройство; У — усилитель; О — объект. Задающее устройство вырабатывает задающее воздействие a (t) (в системе рис. 1.2, а — напряжение ы3), которое с помощью усилителя усиливается и подается на вход объекта с тем, чтобы выходная величина объекта р1 (t) приняла требуемое значение ртр (t). Однако на практике выходная величина объекта р1 (t) по ряду причин отклоняется от требуемого значения. Одной из этих причин является влияние различного рода внешних возмущающих воздействий на объект (на рис. 1.1 и 1.2, б показано одно внешнее возмущающее воздействие L (£)). Например, отклонение частоты вращения электродвигателя (рис. 1.2, а) от требуемого значения может быть вызвано таким внешним возмущающим воздействием, как изменение момента нагрузки Мя на его валу. Другой причиной является влияние изменения параметров объекта или других элементов системы, т. е. влияние параметрических возмущающих воздействий L„ (t) (рис. 1.1 и 1.2,6). Такими параметрическими возмущающими воздействиями электропривода (рис. 1.2, а) могут быть изменения коэффициентов усиления двигателя, ЭМУ и других параметров элементов системы. Впредь внешние и параметрические 0 1 2 3 4 ... 143
|
|||||||||||||||||||||
