Раздел: Документация
0 1 2 3 4 5 6 7 ... 143 Рис. 1.7. Статические характеристики системы с принципом управления по возмущению (рис. 1.6) при различной степени компенсации возмущения (нагрузки): 1 — у < 0; 2 —V = 0; 3 — 0 < V <4 — V = (без АУУ). Запишем уравнения элементов систем в установившемся режиме: суммирующего устройства на входе ЭМУ = ы3 + ын = m3j+ 10Ми; ЭМУ щ = ; двигателя п = &2Md — k3M„, где — коэффициент усиления ЭМУ; k2nks — коэффициенты усиления двигателя по отношению к управляющему и возмущающему воздействиям соответственно. Считаем, что напряжение ын компенсационной обмотки WK (рис. 1.6, б) приведено к обмотке управления и коэффициент приведения вошел в коэффициент /0. Исключая из этих уравнений промежуточные переменные ил и ы2, получаем выражение для статической характеристики систем п = Щ — уМн,(1.1) где п0 = ktk2u3 — частота вращения двигателя в режиме холостого хода; у = k3 — ■— kjkblo — коэффициент усиления системы по отношению к возмущающему воздействию. Из формулы (1.1) видпо, что если у Ф О, то частота вращения двигателя изменяется с изменением Мп. Отклонение частоты Дяв от требуемого значения при данном Мп пропорционально у, т. е. Д«в = уМИ = (kg — ko) М„.(1.2) Очевидно, что с уменьшением у уменьшается влияние Мв на п. В системе без свя-зи~по нагрузке (без АУУ) 10 = 0 и коэффициент у принимает максимальное значение (V = з)> поэтому наблюдается наибольшее влияние М„ на п. Примерный вид статической характеристики п = f (ЛГН) систем для этого случая изображен кривой 4 на рис. 1.7. Вводя связь по нагрузке и изменяя коэффициент 10 этой связи (например, за счет перемещения движков потенциометров Rn и Rm на рис. 1.6, а, б соответственно), можно изменять V. а следовательно, и наклон статической характеристики систем. В частности, можно добиться, чтобы у = 0, когда влияние нагрузки в статическом режиме полностью компенсируется и частота вращения двигателя не зависит от М„ (отклонение частоты от требуемого значения равно нулю). Значение /ф, соответствующее этому случаю, находится из условия компенсации у = k3 — kJt, = 0: /0 = VM2.(1-3) Статическая характеристика системы при у = 0 представляет собой прямую, параллельную оси абсцисс (прямая 2, рис. 1.7). В системе с принципом управления по возмущению можно добиться не только полной компенсации, но и перекомпенсации влияния возмущающего воздействия, т. е. получения отрицательных отклонений. Действительно, увеличивая напряжение, снимаемое с потенциометра Ra (рис. 1.6, а) и увеличивая сопротивление Rm, шунтирующее обмотку WK, можно получить /0 > kg/k, когда у < 0. Статическая характеристика при этом будет иметь уже не отрицательный, а положительный наклон (кривая 1, рис. 1.7): с увеличением МИ частота вращения двигателя п возрастает. В рассматриваемых системах алгоритм управлении имеет вид: ud — kjUs + VoMh,(1.4) т. е. управляющее воздействие щ является простейшей функцией возмущающегб воз-Действия МИ и характеристик управляемого объекта и усилителя. Характеристика, достоинства и недостатки САУ с принципом управления по возмущению. В системах с принципом управления по возмущению для формирования управляющего воздействия использу- 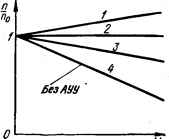 ется непосредственная информация 6 возмущающем воздействии (т. е. информация о причине, вызывающей отклонение). Поэтому в этих системах возможна полная компенсация влияния возмущающего воздействия на управляемую величину, т. е. возможно достижение инвариантности (независимости) управляемой величины относительно данного возмущающего воздействия. Рассмотренным способом можно компенсировать влияние каждого из возмущающих воздействий в отдельности. Однако на практике обычно не удается компенсировать влияние всех возмущающих воздействий, так как значительная часть воздействий не поддается измерению и при компенсации всех возмущающих воздействий получается сложная система. На практике компенсируются лишь основные возмущающие воздействия, наиболее резко влияющие на управляемую величину. В системах управления, задача которых состоит в поддержании постоянства управляемой величины (т. е. в системах стабилизации), основным возмущающим воздействием обычно является изменение нагрузки (в рассмотренных выше системах — изменение момента нагрузки Мн). Система с принципом управления по возмущению является разомкнутой САУ. В ней процесс управления не зависит от результатов (управляемая величина не измеряется и не производится никаких действий, если она не соответствует требуемому значению) и наблюдается только прямое воздействие. Из приведенной характеристики САУ с принципом управления по возмущению видно, что они обладают следующими достоинствами: 1)позволяют полностью компенсировать возмущающие воздействия, т. е. в этих системах возможно достижение инвариантности управляемой величины относительно возмущающих воздействий; 2)в них, как в разомкнутых системах, не возникает проблемы устойчивости. САУ с принципом управления по возмущению присущи следующие недостатки: 1)они устраняют влияние лишь основных возмущающих воздействий, по которым созданы компенсационные каналы; появляется отклонение управляемой величины от требуемого значения с изменением второстепенных возмущающих воздействий, по которым нет компенсационных каналов; 2)в этих системах, как в разомкнутых, появляются отклонения управляемой величины с изменением характеристик объекта и элементов системы (см., например, выражение (1.3): при изменении ku ft2 или fe3, у Ф О и поэтому An Ф 0); 3)применение принципа управления по возмущению ограничено объектами, характеристики которых известны (можно определить). Принцип управления по задающему воздействию применяется в тех случаях, когда изменяется требуемое значение управляемой величины и основным фактором, вызывающим значительное отклонение управляемой величины от требуемого значения, является изменение задающего воздействия на входе инерционного объекта (исходной системы). УО Функциональная схема САУ с прин- i---\ i—; ципом управления по задающему воз- Jj5 •—АУУ действию изображена на рис. 1.8. Зада- 1 ющее устройство ЗУ вырабатывает зада- Рис. 1.8. Функциональная схе-ющее воздействие ос (t), в соответствии ма САУ с принципом управле-с которым должна изменяться управ- ния по 3a*aK« воздействию, ляемая величина Р (t) (в частном случае управляемая величина должна воспроизводить задающее воздействие). Принцип управления по задающему воздействию состоит в том, что для устранения или уменьшения отклонения управляемой величины от требуемого значения, появляющегося в связи с инерционностью объекта (исходной системы) при изменении задающего воздействия, автоматическое управляющее устройство (АУУ) формирует управляющее воздействие ц. (t) из этого задающего воздействия с учетом статических и динамических характеристик объекта (системы). Под влиянием последнего управляемая величина р" (t) стремится .изменяться в соответствии с изменением требуемого значения (задающего воздействия). Формирование управляющего воздействия в АУУ выполняется в соответствии с заложенным алгоритмом управления, имеющим общий вид р, (t) — f [ос (t)], т. е. управляющее воздействие является функцией задающего воздействия. Например, чтобы уменьшить время переходного процесса, возникающего в инерционном объекте при изменении задающего воздействия, необходимо уменьшить влияние инерционности объекта. Этого можно добиться соответствующим функциональным преобразованием задающего воздействия — введением производной от этого воздействия. САУ с принципом управления по задающему воздействию являются разомкнутыми системами. Преимущества и недостатки, свойственные САУ с принципом управления по возмущению, как разомкнутым системам, относятся и к САУ с принципом управления по задающему воздействию. Принцип управления по отклонению (замкнутые САУ) Функциональная схема системы с принципом управления по отклонению управляемой величины от требуемого значения (принципом Ползунова — Уатта) изображена на рис. 1.9. Требуемое значение управляемой величины системы ртр (t) определяется задающим воздействием а (/), поступающим от ЗУ. В частном случае а (/) = ртр (/). Отклонение управляемой величины Р (t) от требуемого значения может быть вызвано как влиянием различного рода возмущающих воздействий (на рис. 1.9 показано одно воздействие L (t)), так и изменением задающего воздействия ос (t). Чтобы уменьшить или устранить это отклонение, нужно выработать соответствующее управляющее воздействие p. (t) и подать его на вход управляемого объекта УО. Управляющее воздействие при использовании принципа управления по отклонению вырабатывается в результате преобразования отклонения б (t) управляемой величины от требуемого значения. 0 1 2 3 4 5 6 7 ... 143
|
