Раздел: Документация
0 ... 3 4 5 6 7 8 9 ... 143 к изменениям параметров ее элементов по сравнению с разомкнутыми системами, где отклонения, вызываемые изменением параметров их элементов, не компенсируются. В системах с принципом управления по отклонению управляющее воздействие получается в результате преобразования сигнала отклонения, а не самого фактора, вызвавшего отклонение, например, возмущающего воздействия (т. е. в результате преобразования следствия, а не самой причины), поэтому оно не может оказать на объект обратное влия ние без запаздывания по сравнению с возмущающим воздействием. Следовательно, принцип управления по отклонению не дает возмож-. ности полного устранения отклонения, т. е. достижения абсолютной инвариантности. Этот вывод не относится к системам с принципом управления по отклонению, в которых осуществляется косвенное измерение * возмущающего (задающего) воздействия с помощью дифференциальных «вилок» [18, 22] или введены специальные связи; Системы с принципом управления по отклонению обладают следующим достоинствами: 1)уменьшают отклонение управляемой величины от требуемого значения независимо от того, Какими факторами (внешними возмущающими воздействиями, изменением параметров элементов системы, изменением задающего воздействия) оно вызвано; 2)менее чувствительны к изменениям параметров элементов систе-ьмы, по сравнению с разомкнутыми системами. I Системам с принципом управления по отклонению присущи следующие недостатки: f 1) в простых одноконтурных системах с принципом управления fao отклонению нельзя достичь абсолютной инвариантности; 2) в системах с принципом управления по отклонению, как в замкнутых системах, возникает проблема устойчивости. Благодаря существенным преимуществам системы с принципом управления по отклонению нашли широкое распространение в технике. Основное внимание в данной книге будет уделено исследованию втих систем. : Принцип комбинированного управления. Пример комбинированной системы и ее анализ в статическом режиме В технике широко применяют САУ с принципом комбинированного управления, сочетающим принципы управления по отклонению и ! по возмущению — комбинированные системы. В комбинированных системах принцип управления по отклонению реализуется с помощью главной обратной связи, а принцип управления по возмущению — с помощью компенсационных связей. Если наиболее существенная ошибка вызывается возмущающим воздействием L, (t), то вводится связь по этому возмущению СВ (рис. 1.11,а), если же такая ошибка получается из-за изменения задающего воздействия ос (t), то связь по задающему воздействию СЗВ (рис. 1.11,6). В первом случае алгоритм управления имеет вид р (t) — / [б {t), L (/)], т. е. управляющее 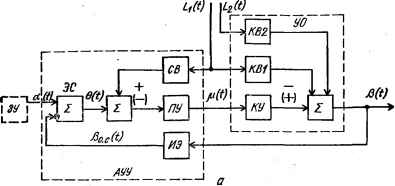 эс сзв I 0ft) ПУ1 ЦПУ2 АУУ ИЭ уо Рис. 1.11. Функциональные схемы комбинированных САУ со связью по возмущению L (t) (а) и со связью по задающему воздействию a (t) (б). воздействие является функцией отклонения и возмущающего воздействия. Во втором случае р (f) = / [б (t), а, (/)], т. е. управляющее воздействие получается в результате преобразования отклонения и задающего воздействия. В общем случае в системе возможны компенсационные связи как по возмущающему, так и по задающему воздействиям, когда для формирования управляющего воздействия используется отклонение, возмущающее и задающее воздействия: р (/) = / [6 (t), L(t), a(t)l В комбинированных системах компенсационная связь по основному возмущению (задающему воздействию) устраняет составляющую ошибки, вызываемую этим возмущением (изменением задающего воздействия), а в результате действия обратной связи уменьшаются ошибки, вызываемые второстепенными возмущающими воздействиями, по которым нет компенсационных связей. Если с помощью компенсационных связей не полностью устраняются ошибки, вызываемые основными возмущающими (задающими) воздействиями, то остаточные ошибки также уменьшаются с помощью обратной связи. Основы теории и методы построения комбинированных систем автоматического управления разработаны советскими учеными В. С. Кулебакиным, А. Г. Ивахненко, Б. Н. Петровым, А. И. Кухтен-ко, Г. М. Улановым и др.. 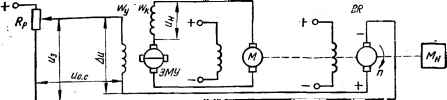 —о—*-1--—- Рис. 1.12. Упрощенная принципиальная схема системы автоматического управления частотой вращения электродвигателя с принципом комбинированного управления. Примером комбинированной системы является система автоматического управления частотой вращения электродвигателя (рис. 1.12). В этой системе компенсационная связь по основному возмущающему воздействию (моменту -нагрузки Ма) осуществляется компенсационной обмоткой WK ЭМУ, а обратная связь —- с помощью та-хогенератора BR. Найдем зависимость п = f (Мн) в установившемся режиме, для чего запишем уравнения элементов системы: компенсационной связи (напряжение, выделяющееся на компенсационной обмотке WK ЭМУ) и„ = !ВМИ; элемента сравнения ЭС Ди = и3 — и ; схемы суммирования ЭМУ «2 = Дм + /0МН; ЭМУ щ = kvu\ электродвигателя п = k2ud — ksMH; тахогенератора иос = kri. Исключая из этих уравнений промежуточные переменные м2 н и&, получаем искомую зависимость п = п0— уМн,(1.7) где "о- 1+kp «з. У~ i+kp •0.8) Лр = kikjii — коэффициент усиления замкнутой части системы в разомкнутом со- • стоянии. Отклонение управляемой величины от требуемого значения составит: Апк = уМн =Ма.(1.9) Из формулы (1.8) следует, что Изменяя /0, можно изменять у и соответственно наклон статической характеристики системы, или отклонение Дпк. При соответствующем выборе коэффициента компенсационной связи /0 значение коэффициента у может быть уменьшено до нуля. При этом полностью компенсируется влияние Мн на л в установившемся режиме. Значение /0 для этого случая находится нз условия компенсации Мн в установившемся режиме: y = ka — k1kil0 = 0,(1.Ю) 10ъ= ks/k.(1.11) Статическая характеристика системы при у = 0 представляет собой прямую, параллельную оси абсцисс. Как н в системах с принципом управления по возмущению, в комбинированных системах имеется возможность перекомпенсацнн возмущающего воздействия. В рассматриваемой системе перекомпенсация влияния иагрузкн возможна, если /„ > ks/kJk2. При изменении параметров системы (&,, kit k3, 10) или неточном нх определении условие компенсации (1.10) нарушается н связь по возмущению не будет уже пол- 0 ... 3 4 5 6 7 8 9 ... 143 |












