Раздел: Документация
0 ... 6 7 8 9 10 11 12 ... 143 .для изменения задающего воздействия система может быть превращена в программную, или следящую, систему. Система фазовой автоподстройки частоты (ФАПЧ) изменяет частоту сог (t) напряжения иг (г) управляемого генератора УГ в соответствии с изменением частоты <ос (г) входного сигнала ис (t) (рнс. 1.14, г). В отлнчие от системы ЧАП (рнс. 1.13, а) в системе ФАПЧ для управления частотой и фазой напряжения на выходе УГ используется не разность частот, а разность фаз напряжений ис (г) и иг (г) на входе и выходе системы. Задающим воздействием системы является фаза a (t) входного напряжения ис (<), а управляемой величиной — фаза (3 (г) выходного напряжения системы (управляемого генератора) иг (f). Напряжения ис (г) и иг (г) поступают иа фазовый дискриминатор ФД, который преобразует разность их фаз 6 (г) = а (г) — Р (г) в напряжение «фд (t) в соответствии со своей статической характеристикой (рис. 1.14,5). На рисунке ФД представлен в виде последовательного соединения элемента сравнения ЭС, который выполняет функцию вычитания фаз, и преобразователя ФДп разности фаз 6 (г) в напряжение Ифд (t). Напряжение «фд (г) сглаживается фильтром Ф и через усилитель-преобразователь УП в виде управляющего напряжения иу (г) поступает на УГ. Под влиянием иу (I) частота сог (}) напряжения иг (t) на вымоде У Г становится равной частоте входного напряжении <ос (г), а разность фаз 6 (/) уменьшается. При изменении сос (i) частота сог (f) изменяется в соответствии с изменением сос (г). Преобразующие автоматические системы. Алгоритм системы: преобразование с необходимой точностью задающего воздействия ос (t) (совокупности задающих воздействий) в управляемую величину {J (t) (совокупность управляемых величин) в соответствии с некоторой функцией преобразования Н: {J (t) = На (t). Преобразующая система должна возможно более точно воспроизводить на своем выходе не само задающее воздействие a (t) (как следящая система), а некоторую величину, связанную с управляющим воздействием функций преобразования Н. К преобразующим системам относятся, например, интегрирующие, дифференцирующие, экстраполирующие и другие системы автоматического управления. Классификация САУ по свойствам в установившемся режиме По свойствам в установившемся режиме САУ делятся на статические и астатические. 1. Статическая система — это система, в которой привозмущающем (задающем) воздействии, стремящемся к постоянной величине, отклонение управляемой величины также стремится к постоянной величине, зависящей от этого воздействия. Примером статической системы является система стабилизации частоты п вращения электродвигателя с принципом управления по отклонению (рис. 1.10, а), так как в ней п при изменении момента нагрузки Мн стремится к заданному значению, но не достигает его на величину статической ошибки, зависящей от Мн. Действительно, в соответствии с формулой (1.6) отклонение Дпо = уМн. Поскольку Y = -f- kp) ф 0, то отклонение частоты Дя0 также не равно нулю и его значение зависит от М„. Показателем точности установившегося режима по отношению к возмущению является коэффициент статизма системы стабилизации, равный тангенсу угла наклона статической характеристики (рис. 1.15): tga = Дп0/ДМн = — у = — k3/(l + kp). 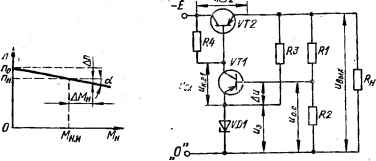 Рнс. 1.15. Статическая Рис. 1.16. Принципиальная схема ста-хйрактеристика статнче- билизатора напряжения на транзнсто-ской системы.pax. Из приведенной формулы видно, что коэффициент статизма, а следовательно, и ошибка Дп0 системы уменьшается с увеличением коэффициента усиления системы kp в разомкнутом состоянии. Из выражения (1.6) видно, что в режиме холостого хода (7ИЧ = 0) управляемая величина (п = п0) пропорциональна значению задающего воздействия и3. Наклон же статической характеристики не зависит от и3. Поэтому, изменяя и3, можно перемещать статическую характеристику параллельно себе в вертикальном направлении. Обычно и3 выбирают таким образом, чтобы управляемая величина точно соответствовала требуемому (номинальному) значению (п — пн) не в режиме холостого хода, а при номинальной нагрузке (MiS - Мт), как показано на рис. 1.15. При такой настройке отклонение управляемой величины от требуемого значения будет меньше, чем при другой (например, при настройке п„ — п0). Примером статической системы автоматического управления может служить также электронный стабилизатор напряжения источника питания, принципиальная схема которого приведена на рнс. 1.16. Электронный стабилизатор предназначен для поддержания с определенной точностью постоянства напряжения "вьх на нагрузке RK (в качестве которой могут быть различные электронные схемы) при изменениях входного напряжения ивх> подводимого от выпрямителя, и нагрузки RH. Управляемой величиной в схеме является выходное напряжение «вых- Задающее напряжение «з снимается со стабилитрона VDI и сравнивается с напряжением обратной связи wo.c снимаемого с резистора jR? делителя напряжения, образованного резисторами R1kR2. Транзистор 1/77 является усилителем разности напряжений Ди = «3 — и0 с, поступающей между его эмиттером и базой, а транзистор VT2, работающий в режиме эмиттерного повторителя,— регулирующим элементом. При номинальном напряжении ивых на нагрузке RH напряжение Аи положительно. При увеличении по абсолютному значению напряжения ывых напряжение = = Ди увеличивается, что вызывает увеличение коллекторного тока VT1 и уменьшение напряжения между его коллектором и эмиттером. Напряжение и через R3 прикладывается между эмиттером н базой транзистора VT2 и поэтому его уменьшение вызывает уменьшение коллекторного тока VT2, увеличение сопротивления между его эмиттером и коллектором, повышение падения напряжения ыкэ2 на VT2, а следовательно, соответствующее уменьшение напряжения мЕЫХ.  Рис. 1.17. Принципиальная схема астатической системы автоматического управления частотой вращения электродвигателя постоянного тока (а) и ее статическая характеристика (б). Изменение падения напряжения на регулирующем транзисторе VT2 возможно лишь при [отклонении «вых от заданного значения (т. е. при появлении ошибки), поэтому рассматриваемая система является статической. Рассмотрены примеры статических систем по отношению к возмущающему воздействию. Различают также системы статические по отношению к задающему воздействию. В этих системах отклонение управляемой величины в установившемся режиме зависит от постоянного значения задающего воздействия. 2. Астатическая система — это система, в которой отклонение управляемой величины в установившемся режиме при любом постоянном значении возмущающего (задающего) воздействия равно нулю. Если отклонение управляемой величины в установившемся режиме не зависит отвозмущающего воздействия, то система является астатической по отношению к этому возмущающему воздействию, если же оно не зависит от задающего воздействия, то астатической по отношению к задающему воздействию. Примером астатической системы по отношению к возмущающему воздействию является система стабилизации частоты вращения ротора двигателя (рис. 1.17, а). В отличие от статической системы (рис. 1.10, а) здесь введен вспомогательный двигатель М2. При отклонении (уменьшении) частоты двигателя Ml от заданной (например, за счет изменения момента нагрузки Мк) появляется напряжение ошибки Ды, которое поступает на усилитель У, усиливается и приводит во вращение вспомогательный двигатель М2. Последний перемещает движок потенциометра R2 таким образом (вверх), что напряжение ыос тахогенератора BR по своему значению приближается к задающему напряжению и3. Двигатель М2 остановится только при Ды = 0, т. е. при достижении двигателем Ml заданной частоты (после устранения ошибки). Статическая характеристика астатической системы изображена на рис. 1.17, б. Выходная величина вспомогательного двигателя — линейное перемещение движка потенциометра R2 (а следовательно, и управляющее воздействие системы) является интегралом от входного напряжения двигателя, пропорционального отклонению (ошибке системы), поэтому двигатель М2 в рассматриваемом случае является интегрирующим устройством. Отсюда можно сделать вывод, что астатическая система отличается от статической наличием интегрирующего устройства. 0 ... 6 7 8 9 10 11 12 ... 143 |












