Раздел: Документация
0 ... 4 5 6 7 8 9 10 ... 143 ностью устранять ошибку в установившемся режиме, вызываемую этим возмущением. Однако в отличие от системы с принципом управления по возмущению (рис. 1.6, б), в которой недокомпенсированная часть ошибки Дпв = (k3 — kjl2lB) Мн (см. формулу (1.2)) не уменьшается, в комбинированной системе эта остаточная ошибка в соответствии с выражением (1.9) уменьшается еще в (1 + kp) раз благодаря действию обратной связи: Дпк = (k3 — k) Мн/(1 + kv) = Дпв/(1 + fep). Отклонения, вызываемые возмущающими воздействиями (изменением задающего воздействия), по которым нет компенсационных связей, в комбинированной системе также будут уменьшаться в (1 + £р) раз за счет замкнутой ее части. В этом можно убедиться, если, например, в выражении (1.9) для отклонения, вызываемого нагрузкой, принять 10 — 0, что означает отсутствие компенсационной связи по этому возмущающему воздействию. В рассматриваемом примере напряжение на входе двигателя ид = kt&.u + kM т. е. управляющее воздействие, является суммой величин, пропорциональных отклонению и возмущающему воздействию. При таком алгоритме управления, как убедились, может полностью устраняться ошибка, вызываемая основным возмущающим воздействием, и уменьшаются в (1 + £р) раз ошибки, вызываемые второстепенными возмущающими воздействиями только в установившемся режиме при МИ — const. Чтобы получить более высокую точность системы и при изменяющемся Мн, управляющее воздействие должно быть более сложной функцией возмущающего воздействия и ошибки, учитывающей динамические характеристики элементов системы. ■ Характеристика САУ с принципом комбинированного управления. Для формирования управляющего воздействия в комбинированных системах используется как непосредственная информация об основных возмущающих воздействиях (изменении задающего воздействия), так и отклонение управляемой величины от требуемого значения, вызываемое всеми возмущающими воздействиями (изменением задающего воздействия). Благодаря этому: 1)в комбинированных системах с помощью компенсационных связей возможно достижение полной компенсации ошибок, вызываемых основными возмущающими и задающим воздействиями (возможно достижение инвариантности); 2)наряду с возможностью полной компенсации ошибок, вызываемых основными воздействиями, в комбинированных системах с помощью обратной связи уменьшаются ошибки, вызываемые второстепенными возмущающими воздействиями, по которым нет компенсационных связей, а также недокомпенсированные ошибки от основных воздействий; 3)при нарушении условий компенсации возмущающего воздействия возникающая ошибка уменьшается замкнутой системой (см. формулу (1.9)), т. е. комбинированные системы менее чувствительны к изменениям параметров разомкнутых каналов, чем разомкнутые САУ; 4)благодаря наличию разомкнутых компенсационных каналов в комбинированных системах не так остро стоит проблема устойчивости, как в замкнутых САУ. Таким образом, комбинированные САУ являются наиболее совершенными системами, обладающими высокой точностью управления. На рассмотренных принципах строятся не только технические системы автоматического управления, но также и системы управления в обществе и регуляционные системы в живых организмах. Поэтому методы исследования технических систем автоматического управления в определенной мере могут быть использованы для исследования систем управления в обществе, и живой природе. 1.3. Классификация систем автоматического управления. Примеры Системы автоматического управления целесообразно классифицировать исходя из наиболее общих признаков и их свойств. Такая классификация облегчает изучение и исследование САУ. Классификация САУ по алгоритмам функционирования Каждая автоматическая система характеризуется алгоритмом функционирования — совокупностью предписаний, определяющих характер изменения управляемой величины в зависимости от воздействия. По алгоритмам функционирования САУ делятся на стабилизирующие, программные, следящие и преобразующие системы. Стабилизирующие автоматические системы. Алгоритм функционирования системы: поддержание с необходимой точностью постоянства (стабилизация) одной или нескольких управляемых величин при произвольно меняющихся возмущающих воздействиях. Задающее воздействие системы.— постоянная величина, т. е. a (t) — const. Примерами стабилизирующих систем с принципом управления по возмущению и отклонению, а также с принципом комбинированного управления являются рассмотренные ранее стабилизирующие системы скорости вращения электродвигателя (см. рисунки 1.6, 1.10 и 1.12). Нагрузка управляемого объекта (момент нагрузки на валу электродвигателя, нагрузка генератора) в стабилизирующих системах обычно является основным возмущающим воздействием, наиболее резко влияющим на управляемую величину. Примером стабилизирующей системы может также служить система частотной автоподстройки {ЧАЩ (рис. 1.13, о), используемая для стабилизации промежуточной частоты в радиоприемных устройствах при произвольном изменении частоты озс (t) принимаемого сигнала. При поступлении на смеситель СМ напряжения сигнала с частотой сос (t) и напряжения управляемого генератора УГ с частотой cor (Q на его выходе возникает напряжение промежуточной частоты сопр (f) = сос (t) — — <ог (/). Это напряжение усиливается усилителем промежуточной частоты УПЧ и " поступает на последующие элементы приемного устройства, а через обратную связь — на частотный дискриминатор ЧД. Последний настроен на номинальное значение промежуточной частоты , соответствующее частоте настройки контуров УПЧ приемника. Частота настройки ЧД сопро = const в рассматриваемой системе является задающим воздействием. ЧД преобразует отклонение промежуточной частоты от заданного значения Лео (Q = сопро — сопр (Q в напряжение мчд в соответствии со своей статической характеристикой (рис. 1.13, б). На схеме ЧД представлен в виде последовательного соединения элемента сравнения ЭС, выполняющего функцию вычитания До> (f) = to — сопр (t), и преобразователя ЧДП отклонения Дсо (() промежуточной частоты от заданного значения в напряжение мчд. С помощью первоначальной настройки управляемого генератора УГ (например, подачей напряжения уставки иуст) устанавливают частоту напряжения на его выходе, равную аг<>, при напряжении на управляющем элементе УГ иу = 0. Значение 0)г выбирают из условия <аПро = <оС() — соГ(), где coCo — средняя частота диапазона изменения частоты сос (/) 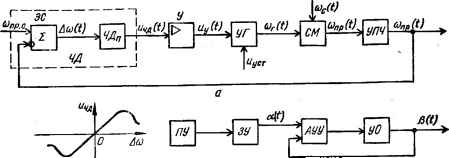 Sб Рнс. 1.13. Функциональные схемы: а — системы частотной автоподстройки; б — статическая характеристика частотного дискриминатора; в — программной системы. сигнала. В этом случае, если <ос (t) = at, то <опр = <оСо — а>г<> = <йпр0, т. е. промежуточная частота точно равна частоте настройки ЧД н поэтому на выходе ЭС Да) (г) = = 0, ичд = 0. Система находится в состоянии равновесия. При отклонении сос (t) от 0)с0 на До)с (/) [<ос (f) = <ucq+ Д<ос (01 произойдет изменение промежуточной частоты на Дсос (г): <*>пр" (о = <ос0 + Дсос (t) — со = сопр0 + Дшс (t). На выходе ЭС возникает отклонение (ошибка) До (t) — — <опр (/) = —Д<ос (г), которое преобразуется в напряжение ичд, усиливаемое усилителем У, н в виде управляющего напряжения «у поступает на управляющий элемент У Г. Под влиянием иу частота шг (f) напряжения генератора изменяется таким образом, что Дш (г) уменьшается. Возмущающим воздействием в данной системе является изменение частоты шс (г) сигнала, а управляемой величиной — значение промежуточной частоты. Программные автоматические системы. Алгоритм функционирования системы: изменение управляемой величины с необходимой точностью в соответствии с заранее составленной программой. Задающее воздействие .системы a (t) = Fu (t), где F„ (t) — программа, заранее известная функция времени. Программную систему можно рассматривать как стабилизирующую систему, в которой задача стабилизации усложняется задачей изменения управляемой величины по заданной программе. Изменение управляемой величины по программе достигается добавлением к стабилизирующей системе некоторого элемента — программного устройства ПУ (рис. 1.13, в), изменяющего задающее воздействие a (t) во времени по определенному закону. Для задания программы могут служить профилированные кулачки, электрические функциональные потенциометры, перфокарты, перфоленты и т. д. Примерами программных систем являются системы управления металлургическими, химическими и другими процессами, системы программного управления станками, системы программного управления выводом спутников Земли на расчетные орбиты, системы управления полетом самолета-снаряда, ракеты по заданному курсу и т. п. Следящие автоматические системы. Алгоритм функционирования системы: изменение управляемой величины с необходимой точностью в соответствии с заранее неизвестной функцией времени, определяемой 0 ... 4 5 6 7 8 9 10 ... 143 |












