Раздел: Документация
0 ... 2 3 4 5 6 7 8 ... 143 АУУ \ЭУ I I I eft) п rft) ДосШ I I—1 I I ИЗ \кв (Ч. КУ уо J3(t) Рис. 1.9. Функциональная схема САУ с принципом управления по отклонению. Принцип управления по отклонению состоит в том, что измеряется управляемая величина, сравнивается с требуемым значением (задающим воздействием) и выявляющееся при этом отклонение преобразуется в управляющее воздействие; последнее, влияя на объект, стремится уменьшить или устранить это отклонение. В состав системы (рис. 1.9) входят следующие элементы: 1.Измерительный элемент ИЭ, который подключается к выходу УО и измеряет управляемую величину Р (f). Измеренное значение этой величины ро.с (t) подается на элемент сравнения. 2.Элемент сравнения ЭС, который сравнивает измеренное значение управляемой величины ро.с (t) с задающим воздействием a (t) и определяет отклонение (сигнал рассогласования) между ними: е(£) == ос (/) — ро.с (t). Инвертирующий вход элемента сравнения означает, что сигнал ро.с (i) вычитается. ; 3. Преобразователь П, в котором при соответствующем преобразовании отклонения, учитывающем характеристики объекта и элементов системы, формируется управляющее воздействие. В простейшем случае управляющее воздействие может быть величиной, пропорциональной отклонению. В общем случае алгоритм управления является более сложной функцией, предусматривающей введение в управляющее воздействие как производных, так и интегралов от отклонения. Преобразователь выполняется в виде различного рода корректирующих устройств. В зависимости от степени сложности необходимого преобразования сигнала рассогласования корректирующее устройство может быть либо простейшей электрической цепью, либо сравнительно сложным электронным вычислительным устройством. 4.Усилитель У, обеспечивающий усиление выходной величины преобразователя до значения, достаточного для поддержания требуемого режима работы объекта. 5.Управляемый объект УО, в котором происходит процесс, подлежащий управлению./ Измерительный элемент, элемент сравнения, преобразователь и усилитель образуют автоматическое управляющее устройство. Как следует из изложенного, АУУ, измеряя отклонение е (t) и соответствующим образом преобразуя его, вырабатывает управляющее воздействие ц (t). Последнее, будучи приложено к управляемому объекту, измени- ет управляемую величину таким образом, что отклонение е it) уменьшается. Алгоритм управления САУ имеет вид р (t) = f [е (t)], т. е. управляющее воздействие является функцией отклонения в (t) управляемой величины. Измерительный элемент, который измеряет управляемую величину на выходе объекта и подает ее на элемент сравнения (вход системы), образует главную обратную связь системы. Иногда в цепь главной обратной связи наряду с ИЭ включаются и другие элементы (элементы обратной связи ЭОС), осуществляющие усиление или необходимое преобразование управляемой величины. Сигнал, поступающий с выхода главной обратной связи на вход (элемент сравнения) системы, называется сигналом главной обратной связи, а разность между задающим воздействием и сигналом главной обратной связи называется сигналом ошибки. Поскольку основной особенностью систем с принципом управления по отклонению является наличие обратной связи, этот принцип называют также принципом обратной связи. Поскольку в САУ с принципом управления по отклонению управляемая величина через главную обратную связь поступает на элемент сравнения (на вход системы), то САУ с принципом управления по отклэнению является замкнутой системой, процесс управления в которой зависит от его результатов. Первыми промышленными САУ с принципом управления по откло- • нению были автоматический регулятор уровня воды в котле паровой машины, изобретенный И. И. Ползуновым (1765 г.), и центробежный регулятор частоты вращения вала паровой машины Уатта (1784 г-)-. Пример системы с принципом управления по отклонению и ее анализ в статическом режиме. Примером САУ с принципом управления по отклонению является система управления частотой вращения ротора электродвигателя (рис. 1.10, а). В этой системе управляемым объектом является электродвигатель М, а управляемой величиной — частота вращения п его ротора. Частота вращения ротора измеряется с помощью тахогенератора BR, напряжение иос которого пропорционально п. Значение иос через обратную связь подается на ЭС, где сравнивается с задающим воздействием — напряжением и3, снимаемым с потенциометра R (задающего устройства). Разность напряжений Дм = и3 — иос подается на вход усилителя (обмотку управления W,y ЭМУ), усиливается и подается на электродвигатель М. Под влиянием входного напряжения иа (управляющего воздействия) частота вращения электродвигателя изменяется так, что ее отклонение от требуемого значения, вызванное тем или иным возмущающим воздействием (например, изменением момента нагрузки /Мн), умень- 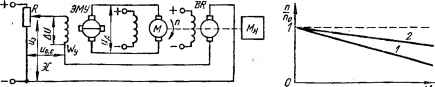 Рис. 1.10. Принципиальная схема (а) и статические характеристики (б) системы автоматического управления частотой вращения электродвигателя с принципом управления по отклонению. 2 7-1719 17 шается. Требуемое значение частоты вращения ротора электродвигателя задают подбором соответствующего напряжения ы3, снимаемого с потенциометра R. Рассмотрим, как система уменьшает отклонение частоты вращения ротора электродвигателя при изменении момента его нагрузки. Пусть увеличился Ми. Вследствие этого уменьшится частота вращения ротора электродвигателя. Вместе с этим уменьшится и напряжение иос тахогенератора BR, что приведет к увеличению разности напряжений Дм. В результате увеличится напряжение иа на входе электродвигателя, а следовательно, и его частота вращения, которая стремится к прежнему значению. Аналогично можно показать, как данная система стабилизирует скорость вращения электродвигателя при уменьшении М„. Чтобы убедиться в стабилизирующих свойствах системы, определим аналитическую зависимость п — f (ЛГН) в установившемся режиме. Для этого запишем уравнения элементов системы в этом режиме: элемента сравнения Дм = и3 — ив с; электромашинного усилителя щ — ku; электродвигателя п = k2ua — ksMH;(1.5) тахогенератора иос = к9п, где k-i, kz, kg, kt — коэффициенты усиления элементов. Исключая промежуточные переменные Дм и «d, находим выражение для статической характеристики системы п = п0 — уМа,(1.6) где i+kp "3 у i+fep ftp = kjktg — коэффициент усиления системы в разомкнутом состоянии. Из формулы (1.6) видно, что поскольку у Ф 0, то частота вращения электродвигателя п изменяется с изменением момента нагрузки Мн. Отклонение частоты вращения Дя0 = уМв — kgMJil + kv). Возникает вопрос, какую же роль играет АУУ, если п изменяется с изменением Ми как без АУУ, так и при включении последнего. Сравнивая выражения для статических характеристик САУ (1.6) и одного электродвигателя (1.5), видим, что при включении АУУ уменьшается влияние Мн на п (уменьшается отклонение) в ks/y = 1 + ftp раз. При этом, как видно из рис. 1.10, б, где изображены статические характеристики двигателя без.АУУ (кривая /) и с АУУ (кривая 2), уменьшается наклон статической характеристики. Она приближается к горизонтальной, т. е. становится более «жесткой». В рассматриваемом примере управляющее воздействие ud = kxku, т. е. оно пропорционально отклонению управляемой величины от требуемого значения. При таком алгоритме управления, как показал анализ, отклонение д/г в установившемся статическом режиме при включении АУУ только уменьшается. Для полного устранения отклонения в установившемся режиме и его уменьшения в переходном режиме управляющее воздействие должно быть более сложной функцией отклонения, зависящей не только от его значения и знака, но и от его интегралов и производных. Характеристика, достоинства и недостатки САУ с принципом управления по отклонению. В САУ с принципом управления по отклонению управляющее воздействие получается в результате преобразования отклонения, которое может быть вызвано различными факторами. Поэтому в этих системах уменьшается отклонение независимо от того, какими из факторов оно вызвано. Напомним, что в САУ с принципом управления по возмущению уменьшаются или устраняются отклонения, вызываемые только теми факторами, по которым имеются компенсационные связи. Поскольку в системах с принципом управления по отклонению уменьшаются отклонения, возникающие и при изменении параметров элементов системы, то замкнутые системы будут менее чувствительны 0 ... 2 3 4 5 6 7 8 ... 143 |












