Раздел: Документация
0 1 2 3 4 5 6 ... 36 оSВ Рис. 1. Схема, поясняющая образование вращающегося магнитного поля. Допустим, что в какой-то момент времени ток в фазе А имеет максимальное значение положительного направления. Наименование направления взято условно. Будем считать положительным ток, протекающий от внутренних витков к внешним. В это время токи в фазах В и С имеют отрицательное направление, а по величине они равны половине максимального значения. Все три обмотки образуют общее магнитное поле, силовые линии которого показаны пунктирными линиями со стрелками. Величину и положение этого поля можно представить условно в виде вектора Ф. Через Vs периода изменения переменный ток принимает максимальное положительное значение в обмотке В, а в обмотках Л и С отрицательное значение, равное половине максимального (рис. 1, б). Суммарное магнитное поле оказывается повернутым относительно первого момента времени на 120°. Положение поля условно показано вектором Ф (рис. 1, б). Через 2/8 периода ток принимает максимальное положительное значение в обмотке С, а в обмотках А и В — половинное отрицательное значение. Суммарное магнитное поле поворачивается еще на 120° (рис. 1, в). Затем процесс повторяется. Таким образом, неподвижные обмотки, обтекаемые трехфазным током, создают вращающееся магнитное поле. За один период изменения тока поле совершает один оборот. Если машина имеет две пары полюсов, то вращающееся поле за один период изменения тока повернется только на пол-оборота. Частота вращения поля п0, об/мин где / — частота тока, Гц; 0  р — число пар полю- сов машины. В реальных машинах витки обмотки уложены равномерно по окружности статора. Магнитные силовые линии поля также рас- а пределяются равномерно по Рис- 2. Условные обозначения щающееся поле, не изменяющееся по величине, называют круговым (рис. 2, а). Если по какой-нибудь причине симметрия токов в обмотках нарушается и хотя бы один из токов трехфазной системы будет отличаться либо по величине, либо по фазе, поле будет вращаться с той же самой скоростью, однако его величина будет изменяться в зависимости от положения в пространстве. Такое поле не будет круговым, его можно представит» в виде эллипса (рис. 2, б). Под действием вращающегося поля в обмотках ротора индуктируется электродвижущая сила (ЭДС), которая создает ток в обмотке ротора. В результате взаимодействия этого тока с магнитным потоком появляется механическое усилие, направленное по касательной к окружности ротора и создающее вращающий момент на валу. Замечательно то, что между статором и ротором нет механической связи в обычном ее понимании. Она осуществляется посредством магнитных силовых линий, которые играют роль гибкой связи. Ротор увлекается вслед за вращающимся полем. При запуске без нагрузки ротор быстро набирает скорость и догоняет магнитное поле. Скорость, с которой проводник с током (обмотка ротора) пересекает магнитные силовые линии вращающегося поля, уменьшается. Это приводит к снижению ЭДС и тока ротора и к уменьшению вращающего момента. Вращение, при котором скорости поля и ротора будут равными, называется синхронным. Магнитное поле и ротор, вращаясь с одинаковой скоростью, остаются неподвижными относительно друг друга. При отсутствии относительного перемещения ЭДС в роторе равна нулю, следовательно равен нулю и вращающий момент на валу. Таким образом, при синхронной скорости момент двигателя отсутствует. воздушному зазору между статором и ротором. Вра- кругового и эллиптического вращающегося магнитного поля. При отставании ротора появляются пересечение магнитных силовых линий, ЭДС и ток в обмотке, а на валу двигателя — вращающий момент. Разность скоростей поля статора и ротора называется скольжением и измеряется в процентах относительно синхронной скорости или в относительных величинах: ю0—со s = - 100%, (3) где со„— скорость вращения магнитного поля (синхронная скорость); ш — скорость вращения ротора. При неподвижном роторе скольжение равно 100%. Несмотря на отсутствие механической или электрической связи между неподвижным статором и вращающимся ротором, изменение нагрузки на валу двигателя вызывает соответствующие изменения тока статора. Передача энергии осуществляется следующим образом. При увеличении момента сопротивления со стороны рабочей машины снижается скорость вращения ротора и возрастает скольжение. Магнитные силовые линии вращающегося поля с большей скоростью пересекают обмотку ротора, что приводит к возрастанию ЭДС и тока в роторе. Созданный таким образом ток образует свое магнитное поле, которое направлено противоположно полю статора. Размагничивающее действие этого потока компенсируется возрастанием тока статора. Таким образом, возрастание скольжения ротора приводит к росту тока статора и увеличению энергии, передаваемой ротору через воздушный зазор двигателя. Свойство двигателя реагировать на изменение скольжения отражается в его механической характеристике, представляющей собой зависимость вращающего момента от скорости вращения (рис. 3). На этой характеристике можно выделить несколько точек, представляющих основные параметры двигателя. Номинальной скорости вращения о,, соответствует номинальный момент Мк. Рис. 3. Механическая характери- Значение момента прн стика асинхронного двигателя. неподВИЖИОМ роторе М„ 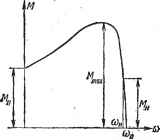 0 1 2 3 4 5 6 ... 36 |












