Раздел: Документация
0 ... 22 23 24 25 26 27 28 ... 49 в контуре межгрупповой коммутации не участвуют (за исключением индуктивностей рассеяния), так как коммутирующий ток конденсатора С, в каждой полуобмотке реакторов будет создавать взаимно компенсирующиеся потокосцепления. Емкость конденсатора должна выбираться из тех же условий, что и для параллельного инвертора тока. Использование запираемых тиристоров исключает необходимость в элементах искусственной коммутации, упрощая тем самым схему и повышая технико-экономические показатели. 3.4. РЕГУЛИРОВАНИЕ ВЫХОДНОГО НАПРЯЖЕНИЯ АВТОНОМНЫХ ИНВЕРТОРОВ 3.4.1. ОБЩИЕ ПРИНЦИПЫ РЕГУЛИРОВАНИЯ Как правило, в автономных инверторах требуется регулирование выходного напряжения, в частности его стабилизация, при различных возмущающих факторах, главным образом при изменении входного напряжения и изменении нагрузки. В зависимости от схемы инвертора можно использовать различные способы регулирования выходного напряжения. В самом общем виде эти способы можно разделить на три группы: 1)регулирование напряжения на входе инвертора; 2)регулирование посредством воздействия на процессы в инверторе, влияющие на выходное напряжение; 3)регулирование напряжения непосредственно на нагрузке за счет использования стабилизаторов переменного напряжения на выходе инвертора. Способы первой группы основаны на пропорциональности выходного напряжения инвертора входному. Они применяются, когда источником постоянного тока является управляемый выпрямитель. Кроме того, эти способы могут быть реализованы посредством включения на входе инверторов регуляторов постоянного напряжения: транзисторных непрерывного действия (для маломощных инверторов), импульсных и др. Способы второй группы во многом определяются схемой инвертора. Например, в инверторах тока значение выходного напряжения непосредственно связано с нагрузкой. Из этого следует, что введением регулируемых активных или реактивных эквивалентов нагрузки на выходе инвертора можно компенсировать изменение нагрузки и тем самым регулировать выходное напряжение инвертора. На этом принципе основано много различных схем силовых регулирующих устройств в инверторах тока. В некоторых типах инверторов регулирование выходного напряжения можно осуществлять за счет изменения частоты 152 инвертирования. Это прежде всего относится к инверторам тока и резонансным инверторам, используемым в качестве промежуточного звена в преобразователях постоянного напряжения (одного напряжения в другое). В инверторах напряжения регулирование наиболее целесообразно осуществлять за счет изменения длительности проводящего состояния основных тиристоров схемы, используя при этом различные способы модуляции напряжения, например широтно-импульсный. В некоторых случаях рациональным является способ регулирования, основанный на геометрическом суммировании выходных напряжений двух или более инверторов, сдвинутых между собой по фазе, изменять которую можно за счет изменения следования управляющих импульсов. Этот способ чаще всего используют при регулировании инверторов напряжения, но он может быть применен и для инверторов тока. Способы третьей группы применяются редко, обычно в инверторах небольшой мощности, так как они связаны с использованием дополнительных устройств, существенно ухудшающих массогабаритные и технико-экономические характеристики инвертора. Такими устройствами обычно служат феррорезонансные, тиристорные, индукционные и другие типы регуляторов переменного тока. Способы регулирования этой группы могут оказаться приемлемыми только при сравнительно «жестких» внешних характеристиках самого инвертора, например инвертора напряжения. Различные типы регулирующих устройств, позволяющих реализовать способы первой и третьей групп, подробно рассматриваются в гл. 4. Поэтому в настоящем параграфе разбираются только способы второй группы. 3.4.2. РЕГУЛИРУЮЩИЕ УСТРОЙСТВА ИНВЕРТОРОВ ТОКА Выходное напряжение инверторов тока С/и зависит от параметров нагрузки и дополнительных активных и реактивных элементов, установленных на выходе инвертора, в частности коммутирующих конденсаторов Ct (см. § 3.2). Эта зависимость выражается в общем случае согласно методу основной гармоники следующей формулой: - fccxCOsP где ксх — коэффициент схемы (см. § 2.2); Ud — входное напряжение инвертора; Р—угол опережения. Следовательно, выходное напряжение инвертора тока может регулироваться изменением входного напряжения Ud или угла р. Если требуется стабилизировать выходное напряжение при неизменном значении входного напряжения Ud, то согласно (3.55) достаточно обеспечить во всех режимах работы постоянство утла р. Рассмотрим на примере схемы параллельного инвертора тока способы стабилизации его выходного напряжения при изменениях нагрузки и неизменном значении входного напряжения Ud. В параллельном инверторе тока (см. § 3.2) в ртличие от инвертора, ведомого сетью, угол Р однозначно определяется параметрами коммутирующего конденсатора Ск и нагрузки на выходных шинах инвертора. Используя уравнение баланса реактивных мощностей (3.20), угол р для параллельного (так же как и для последовательного и параллельно-последовательного) инвертора тока можно выразить соотношением P = arctg&.(3.56) * н Из (3.56) следует, что изменение любой составляющей суммарной мощности на выходе инвертора приводит к изменению угла р. Стабилизация угла Р, а следовательно, и выходного напряжения при изменениях нагрузки может осуществляться двумя существенно различными путями, определяемыми принципом построения системы управления инвертора. Первый заключается в том, что управляющие импульсы поступают на тиристоры инвертора синхронно с выходным напряжением. При этом фаза их следования соответствует углу опережения р. Такой способ управления обычно реализуется посредством привязки моментов формирования управляющих импульсов непосредственно к кривой выходного напряжения (подробно системы управления подобного типа рассматриваются в гл. 5). Инвертор тока, работающий с «жестко» заданным значением угла р, называют инвертором с зависимым возбуждением [14] (или инвертором с самовозбуждением) в отличие от инвертора с независимым возбуждением, у которого частота и фаза следования управляющих импульсов не связаны с выходными параметрами инвертора и определяются только работой маломощного задающего генератора системы управления. Отличительной особенностью инвертора тока, работающего в режиме с зависимым возбуждением, является изменение частоты его выходного напряжения при изменении параметров нагрузки. Изменение частоты при фиксированном значении угла Р вызывает такое изменение реактивных мощностей конденсатора С, и нагрузки QK, при котором баланс мощностей сохраняется с неизменным значением угла р. Иначе это явление можно объяснить тем, что сопротивления (или проводимости) реактивных элементов на выходе инвертора зависят от частоты выходного напряжения. Поэтому, когда происходит изменение нагрузки, частота выходного напряжения изменяется так, что угол В, являющийся согласно (3.17) аргументом комплексного сопротивления (или проводимости) на выходе инвертора, остается постоянным и равным углу, заданному системой управления. Если инвертор работает в режиме независимого возбуждения, то изменение нагрузки приводит к изменению угла р. Например, уменьшение активной Рн или реактивной QH составляющей мощности нагрузки приводит согласно (3.56) к росту угла р. Если рассмотреть для этого случая баланс реактивных мощностей на выходе инвертора, то можно увидеть, что уменьшение мощности нагрузки (как активной, так и реактивной ее составляющих) приводит к относительному увеличению мощности конденсаторов Qx (возникает избыточность реактивной мощности, генерируемой конденсаторами CJ. Увеличение мощности нагрузки вызывает обратное явление, в результате которого происходит уменьшение угла р. Для стабилизации (регулирования) угла р в инверторах тока применяют специальные устройства, позволяющие обеспечить заданный угол р в различных режимах работы инвертора. Принцип действия таких устройств основан на изменении активной, активно-реактивной или реактивной мощности на выходе инвертора. Поэтому они по существу являются регуляторами мощности. Стабилизация (регулирование) угла Р в этом случае осуществляется за счет компенсации изменения мощности нагрузки. Например, если мощность нагрузки уменьшилась и возник избыток реактивной мощности конденсаторов, то согласно (3.56) для обеспечения постоянства угла Р необходимо уменьшить реактивную мощность конденсаторов или увеличить мощность, потребляемую дополнительными устройствами.—регуляторами мощности, которые будут в этом случае поглощать избыток реактивной мощности, генерируемой конденсаторами. Таким же способом при неизменной нагрузке можно регулировать угол р, а следовательно, и выходное напряжение. Регулирование мощности на выходе инвертора может использоваться и в цепях регулирования частоты выходного напряжения, если угол р фиксирован системой управления. В частности, такие регуляторы мощности используются для стабилизации частоты в инверторах с комбинированным возбуждением [14], принцип управления которыми рассматривается в § 5.3. Практическое применение для компенсации изменения мощности нагрузки нашли тиристорные регуляторы реактивной и активно-реактивной мощности различных типов. Среди них наибольшее распространение получило компенсирующее 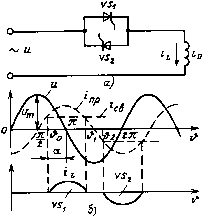 Рис. 3.25. Компенсирующее устройство, выполненное на основе реактора со встречно-параллельно включенными тиристорами устройство, выполненное на основе -реактора, включенного последовательно со встречно-параллельно соединенными тиристорами (рис. 3.25, а). Допустим, что на входе компенсирующего устройства имеется синусоидальное напряжение, потери энергии в схеме равны нулю, а тиристоры идеальные. Если в момент 90, находящийся в интервале от л/2 до л, подать управляющий импульс на тиристор VSU то он включится и через индуктивность L0 начнет протекать ток. Этот ток можно представить в виде суммы двух составляющих — свободной /св(9) и установившейся /у(9): к (9) = iysi (9) = iCB (9) + iy (9).(3.57) Установившаяся составляющая (3)= Jkcos», (3.58) амплитуда приложен- ие L0 — индуктивность реактора; Um ного напряжения. Свободную составляющую можно определить из закона коммутации тока в индуктивных цепях, согласно которому ток в момент коммутации в индуктивности скачком не изменяется, т. е. в момент 90 (Э0) = (е.(») + (») = 0.(3.59) Из (3.58) и (3.59) следует ic.(»o)=-TLcos»0. (3.60) Так как свободная составляющая из-за отсутствия потерь в схеме не затухает, то iCB (9) = iCB (90). При угле управления ос=я —90 получим: iL (9) = —4ol (cos а+cos 9). CuLq (3.61) Диаграммы изменений тока и напряжения представлены на рис. 3.25, б. В момент 91=я-!-ас ток iL(9) становится 156 равным нулю и тиристор VSt выключается. Затем в момент времени 92 подается управляющий импульс на тиристор VS2 и ток в реакторе начинает протекать в противоположном направлении. Ток в реакторе при периодическом следовании управляющих импульсов имеет периодический характер, и его можно разложить в гармонический ряд. Действующее значение первой гармоники тока rLl=hm(oL-&xa2aj,(3.62) где Im=UJ(oL0. Из (3.62) следует, что, изменяя угол а в интервале от 0 до я/2, получаем изменение действующего значения тока первой гармоники в диапазоне от нуля до 1т. Необходимо отметить, что увеличение угла а сверх я/2 приведет к тому, что проводимость соответствующего тиристора станет больше половины периода. Это вызовет нарушение в симметричности работы тиристоров VS и VS2, так как если интервал* проводимости одного тиристора больше чем я, то второй к моменту подачи на него управляющего импульса будет шунтирован первым и не вступит в работу. Снижение тока IL1 при уменьшении угла а эквивалентно увеличению индуктивного сопротивления всей цепи компенсирующего устройства, что можно выразить соотношением v2(а—-sin2aj где х0 = (йЬ0—индуктивное сопротивление реактора L0 на частоте входного напряжения. Регулирование компенсирующего устройства приводит к изменению потребляемой им реактивной мощности. Следовательно, изменяя угол а, можно компенсировать изменение мощности нагрузки на выходе инвертора таким образом, чтобы угол Р оставался на заданном уровне. Для того чтобы сохранять значение угла" Р, а следовательно, и- выходного напряжения на заданном уровне во всем диапазоне изменения нагрузки от холостого хода до максимального значения, необходимо, чтобы Ql max~QC Р« max (tg Фт« + tg Pma*),(3.64) где фтах — максимальное значение угла сдвига между первыми гармониками напряжения и тока нагрузки; Qbmax — максимальная реактивная мощность, потребляемая компенсирующим устройством при угле ос = я/2. 0 ... 22 23 24 25 26 27 28 ... 49 |












