Раздел: Документация
0 ... 23 24 25 26 27 28 29 ... 49 Отсюда, учитывая (3.64), можно получить следующее соотношение для определения индуктивности l0: L0*l/co2C\,(3.65) где со—частота выходного напряжения инвертора; Ск—емкость, установленная на выходе инвертора. Рассматриваемый тип компенсирующего устройства улучшает форму кривой выходного напряжения. Это объясняется тем, что обычно его расчетная мощность выбирается из условия полной компенсации мощности конденсатора Qc-Последняя определяется из условия обеспечения устойчивой работы инвертора в режимах кратковременных перегрузок, т. е. с запасом по отношению к номинальной нагрузке. Поэтому к выходным шинам инвертора оказывается постоянно подключенной эквивалентная индуктивность компенсирующего устройства. Наличие же индуктивной нагрузки в параллельном инверторе существенно улучшает форму его выходного напряжения. Указанные преимущества обусловили широкое применение компенсирующих устройств рассматриваемого типа в инверторах тока. В целях улучшения массогабаритных показателей инверторов тока разработаны их различные модификации. 3.4.3. РЕГУЛИРОВАНИЕ ВЫХОДНОГО НАПРЯЖЕНИЯ ПОСРЕДСТВОМ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ (ШИМ) Этот способ регулирования в основном используется в схемах инверторов напряжения. Суть его заключается в изменении длительности проводящего состояния ключевых элементов схемы инвертора по определенному закону. Рассмотрим этот способ на примере однофазной схемы инвертора напряжения, выполненной на транзисторах (см. рис. 3.15). Если нагрузка чисто активная, то форма тока повторяет форму напряжения и широтно-импульсное регулирование выходного напряжения можно осуществить уменьшением длительности управляющих импульсов на угол а (рис. 3.26, а). Действующее значение выходного напряжения инвертора при таком способе управления транзисторами и чисто активной нагрузке будет равно Um=UtJf-±.(3.66) Действующие значения гармонических составляющих выходного напряжения при длительности проводящего состояния транзисторов XVT = n — ос вычисляются по формуле 158 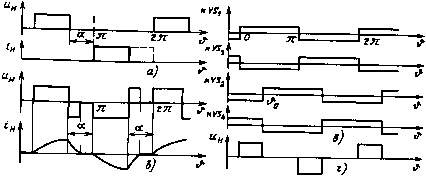 Рис. 3.26. Широтно-импульсная модуляция в однофазном инверторе напряжения: вЬ«оеГРтПРЯЖеНИЯ ПРИ актнвнои нагрузке: б-диаграммы тока и напряжения на выходе инвертора при актнвно-нндуктнвной нагрузке; «-диаграмма управляющих импульсов, обеспечивающих шунтирование нагрузкиГг - диагра™ выходношТапГе-ння инвертора при шунтировании нагрузки 4Ud . и(л—а) U„ = — sin \ , таг2 (3.67) где п — номер гармонической составляющей (л= 1, 3, 5...). На практике часто требуется стабилизация действующего значения первой гармоники выходного напряжения при изменении входного в диапазоне от Udmin до Udmax. Для этого неоЬходимо изменять угол управления от нуля (при Ud=Ud ■) До <W (при Ud=Udmax): ■- п — 2 arcsin Ud„ (3.68) При этом будет изменяться гармонический состав выходного напряжения. С увеличением угла а относительное содержание высших гармоник в кривой выходного напряжения будет увеличиваться. Если нагрузка активно-индуктивная, то после выключения транзисторов ток в нагрузке продолжает в течение некоторого времени, определяемого "количеств.ом запасенной энергии в реактивных элементах нагрузки, протекать в прежнем направлении через обратно включенные диоды. При включении обратных диодов выходное напряжение изменяет свой знак на противоположный (рис. 3.26, б). В момент снижения тока нагрузки до нуля напряжение на нагрузке вновь становится равным нулю. Появление отрицательной площадки в кривой выходного напряжения изменит его гармонический состав. Для устранения этого нежелательного явления было бы необходимо на время паузы а шунтировать нагрузку, например, с помощью двух встречно-параллельно соединенных транзисторов. Однако это усложняет схему. Значительно проще данная задача решается изменением способа осуществления широтно-импульсной модуляции. На транзисторы каждого плеча схемы подаются непрерывные управляющие импульсы с изменяющейся через промежуток я полярностью (рис. 3.26, в). Положительная полярность импульса соответствует включению, а отрицательная — выключению транзистора. Управляющие импульсы одного плеча могут сдвигаться относительно импульсов другого на угол а. При таком способе управления на интервале 0 —90 включены транзисторы VT1 и КГ4, а начиная с момента 90 на транзисторы КГ4 и VT2 подаются управляющие импульсы. Ток нагрузки начинает протекать через транзистор VTX и обратный диод VD2. Это цепь шунтирует нагрузку, и выходное напряжение становится равным нулю. Короткого замыкания на стороне постоянного тока инвертора при этом не возникает, так как транзисторы VT3 и VT4 выключены. Напряжение на выходе инвертора остается равным нулю в течение всего интервала 90 —я, соответствующего углу управления а. Когда ток нагрузки спадет до нуля, что приведет к выключению диода VD2, транзисторы VT3 и VT4 останутся в закрытом состоянии и напряжение источника на нагрузку не поступит. В момент я поступают отпирающие импульсы на транзисторы КГ3 и VTX. На транзисторе VT2 в этот момент уже присутствует управляющий импульс, поэтому транзисторы VT2 и VT3 включаются и на нагрузке формируется напряжение прямоугольной формы, но противоположной полярности. При таком способе регулирования выходное напряжение инвертора не будет зависеть от параметров нагрузки и форма его будет соответствовать работе инвертора с ШИМ на чисто активную нагрузку (рис. 3.26, г). В связи с этим для данного способа регулирования остаются справедливыми соотношения (3.66) и (3.67). Регулирование выходного напряжения посредством ШИМ применяется и в инверторах, выполненных на транзисторах или запираемых тиристорах. Однако реализация этого способа возможна и в схемах на обычных тиристорах, в которых принцип коммутации позволяет выключить любой из основных тиристоров в нужный момент времени. Примером может служить схема с импульсной коммутацией, приведенная на рис. 3.18. В этой схеме при ШИМ управляющие импульсы основных тиристоров одного плеча следуют со сдвигом на угол а относительно управляющих импульсов основных тиристоров другого плеча. Применение ШИМ в трехфазных инверторах напряжения имеет особенности, связанные со схемой соединения нагрузки (звезда или треугольник) и способом управления ключевыми элементами схемы, определяющим длительность их проводя- щего состояния. При этом электромагнитные процессы, протекающие в схеме, имеют значительно более сложный характер, чем в однофазной схеме, и находятся в сильной зависимости от параметров нагрузки. Если индуктивная составляющая нагрузки достаточно велика (низкий коэффициент мощности), то регулирование посредством ШИМ становится затруднительно. 3.4.4. ГЕОМЕТРИЧЕСКОЕ СЛОЖЕНИЕ НАПРЯЖЕНИЙ При двух или более инверторах регулирование напряжения на нагрузке можно осуществить методом суммирования выходных напряжений отдельных инверторов. Такой метод применим к инверторам различных типов. Однако тип инвертора определяет особенности реализации метода в каждом конкретном случае. Поэтому рассмотрим этот метод применительно к инверторам напряжения и тока. На рис. 3.27, а изображены инверторы их и и2, выходные трансформаторы которых по вторичным обмоткам соединены последовательно. Предположим, что инверторы выполнены по схеме однофазных инверторов напряжения без выходных 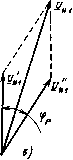 и* 17С
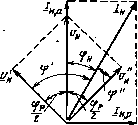 Рис. 3.27. Геометрическое суммирование выходных напряжений инверторов: а—блок-схема; 6—диаграммы напряжений для двух однофазных инверторов напряжения; в и г—векторные диаграммы первых гармоник напряжения и тока нагрузки инверторов фильтров (наличие фильтров не накладывает принципиальных ограничений на этот метод). Тогда выходное напряжение каждого из них имеет прямоугольную форму (рис. 3.27, б). Очевидно, что при таком включении инверторов напряжение на нагрузке ин будет равно сумме напряжений инверторов и„ и и„. Если эти напряжения имеют одинаковую частоту (т. е. инверторы синхронизированы по частоте), но сдвинуты по фазе относительно друг друга на угол срр, то напряжение на нагрузке и„ будет иметь ту же частоту, но отличаться по форме и значению. На тех участках, когда мгновенные значения напряжений «и и ик противоположны по знаку, например на интервале О — 9Ь сумма их равна нулю и напряжение ин тоже равно нулю; когда же эти напряжения совпадают по знаку, например на интервале dt — тс, они складываются. В результате напряжение на нагрузке приобретает форму, подобную той, которая получается в инверторах напряжения, регулируемых по способу ШИМ. Изменением угла срр можно регулировать выходное напряжение от нуля (фр = тс) до 2(7d((pp = 0). Для первых гармоник выходных напряжений инверторов можно составить векторную диаграмму (рис. 3.27, в), из которой видно, что вектор напряжения (Ун1 равен геометрической сумме векторов напряжений ци1 и ubl. Рассмотрим распределение нагрузки между инверторами, учитывая только первые гармоники выходных напряжений (индекс 1, обозначающий первую гармонику, далее опускается). Полученные выводы будут справедливы и для других типов инверторов, имеющих выходное напряжение, близкое к синусоидальному, в частности для инверторов тока. Если напряжения £/„ и uu равны и сдвинуты между собой по фазе на угол фр, то напряжение на нагрузке (Ун, равное их геометрической сумме, будет сдвинуто на один и тот же угол фр/2 относительно векторов ub и £7. Из векторной диаграммы на рис. 3.27, г следует, что t/. = 2t/;cos = 2t/;cos.(3.69) Баланс мощностей в рассматриваемой системе зависит не только от изменения нагрузки, но и от угла фр. Проследим влияние угла фр на баланс мощностей на примере такого случая регулирования, когда стабилизация напряжения (Ун происходит при одновременном изменении напряжений u„ и u, амплитуды которых остаются равными между собой. При последовательном соединении вторичных обмоток выходных трансформаторов через них протекает общий ток нагрузки L, который будем считать активно-индуктивным, т. е. отстающим от вектора на угол фн. Если напряжение uk опережает этот ток на угол Ч" = фр/2--фн, а напряжение ui отстает на угол Ч7" = фр/2 —фн, то инвертор и± работает в режиме с общим индуктивным характером нагрузки (ток отстает от напряжения), а инвертор и2 — в режиме с общим емкостным характером нагрузки (ток опережает напряжение). Выделив на векторной диаграмме активную /н.а и реактивную составляющие тока нагрузки 1, видим, что каждая из этих составляющих сдвинута относительно векторов lfK и 1Ти на угол, отличный от нуля и тс/2. Следовательно, взятые в отдельности индуктивная и активная составляющие результирующей нагрузки являются смешанными нагрузками для каждого из инверторов. Поэтому баланс мощностей в системе можно выразить следующими соотношениями: для инвертора иг q. = q»..+qu,P=o,5PJ tgcp.+tg для инвертора и2 .Фр К = Рш,ш + Р:.ш = 0,5Ря[ l+tg9Htg); qi=q«.*+е:.Р=о,5ри (tg Фн - tg ), (3.70) здесь мощности с индексом «а» обусловлены активной составляющей нагрузки, а с индексом «р»—реактивной. Из (3.7J0) следует, что при угле фр = 0 активная и реактивная составляющие мощности нагрузки делятся между инверторами щ и и2 поровну. С ростом фр инвертор их (выходное напряжение которого опережает ток нагрузки) разгружается по активной мощности ри, но получает дополнительную загрузку по реактивной мощности q„. В то же время для инвертора и2 (выходное напряжение которого отстает от тока нагрузки) увеличение фр вызывает обратное действие. Соотношения (3.70) справедливы и для инверторов тока. В частности, если геометрическое-суммирование осуществляется для параллельных инверторов тока, имеющих компенсирующее устройство реактивной мощности, то для каждого из них, учитывая (3.70), можно записать tgP = Qc-Q*,y-0,5PK[tgq>H±tg Фр 0,5PH l±tgq>„tg (3.71) 0 ... 23 24 25 26 27 28 29 ... 49 |
||||||||||||||||||||












