Раздел: Документация
0 ... 26 27 28 29 30 31 32 ... 49 Вых.
Рис. 3.36. Диаграммы формирования синусоидальной ШИМ На рис. 3.35, б представлена форма выходного напряжения однофазного инвертора при двухполярной модуляции. При at = 26,30 и а2 = 33,3° третья и пятая гармоники будут равны нулю. Содержание высших гармоник может быть сведено к минимуму, если использовать широтно-импульсную модуляцию интервалов проводимости ключевых элементов схемы по синусоидальному закону в течение каждого полупериода (рис. 3.35, в). При таком способе роль выходных фильтров в обеспечении синусоидальности напряжения сводится к минимуму, так как относительное содержание высших гармоник очень мало. Среди различных способов организации ШИМ следует отметить ШИМ, реализуемую посредством сравнения эталонной синусоиды с треугольным сигналом, принцип которой иллюстрируется диаграммами на рис. 3.36. Схематическая реализация этого принципа достаточно проста при незначительном ухудшении гармонического состава по сравнению с реализациями ШИМ на других аналогичных принципах. Использование микропроцессорной техники позволяет значительно повысить эффективность ШИМ с программным исключением высших гармоник. Перспективным принципом организации синусоидальной ШИМ является принцип следящих систем [15]. При таком способе ШИМ отслеживается и минимизируется отклонение усредненной кривой выходного напряжения от синусоиды посредством управления состояниями ключевых элементов инвертора. Этот способ обеспечивает очень низкий • уровень высших гармоник в выходном напряжении. Но главное его достоинство заключается в том, что синусоидальность выходного напряжения сохраняется и при существенно нелинейной нагрузке инвертора. Распространенным примером такой нагрузки является выпрямитель соизмеримой с инвертором мощности, содержащий фильтры из реактивных элементов. В заключение кратко рассмотрим способ улучшения формы кривой выходного напряжения в трехфазно-однофазном преобразователе частоты с непосредственной связью, каждая группа которого выполнена на трехфазной схеме со средней точкой (см. рис. 3.23). Обычно нагрузка преобразователя имеет активно-индуктивный характер. При работе преобразователя на активно-индуктивную нагрузку без перерывов в выходном напряжении необходимо, чтобы тиристоры каждой группы могли работать как в выпрямительном, так и в инверторном режимах. Для того чтобы при переходе от выпрямительного режима к ин-верторному в выходном напряжении отсутствовал перерыв, применяют согласованное управление тиристорами. Принцип этого управления состоит в подаче управляющих импульсов так, чтобы тиристоры группы I могли работать один полупериод в выпрямительном режиме с углом a тс/2, а второй полупериод — в инверторном с углом a = тс —Р тс/2. Группа 11тиристоров в первом полупериоде готова к инверторному режиму, а во втором полупериоде — к выпрямительному. При таком управлении между двумя группами могут возникнуть значительные уравнительные токи. Для их уменьшения углы аир выбирают так, чтобы средние значения напряжений выпрямительного и инверторного режимов были равны между собой, т. е! соблюдалось равенство а = р. Уравнительный же ток, обусловленный разностью мгновенных значений напряжений групп, ограничивается реактором, включенным в цепи, объединяющие обе группы. Выходное напряжение такого преобразователя в общем случае несинусоидально. Гармонический состав этого напряжения зависит от ряда факторов: закона изменения углов а и Р, числа фаз питающей сети и т. д. Содержание высших- гармоник в выходном напряжении может быть значительно уменьшено, если углы управления аир изменять по арккосинусному закону а=тс — Р = arccos (/с sin со2 г),(3.82) где к — отношение амплитуд напряжений на входе и выходе преобразователя; со2 — частота выходного напряжения. Из (3.82) следует, что при к= 1 углы аир должны изменяться линейно во времени (т. е. арккосинусная функция в данном случае превращается в линейную функцию от &=ю2г)от 0 до тс/2. 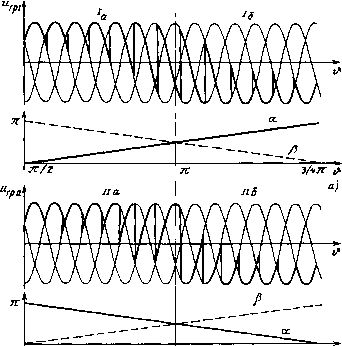 »)
Рис. 3.37. Обеспечение синусоидальности выходного напряжения в преобразователе частоты с непосредственной связью за счет переменного угла управления: а—диаграмма выходного напряжения преобразователя, 6—закон изменения углов управления тиристорами преобразователя; в—диаграммы выходных тока н напряжения В течение первого полупериода группа I подготовлена к работе в выпрямительном режиме и управляющие импульсы поступают на тиристоры этой группы с углом а, который принимает значения тс/2 — 0 — тс/2 (тс/2 соответствует прохождению полуволны выходного напряжения через нуль, а значение угла ос = 0— ее максимуму). Одновременно тиристоры группы II подготовлены для работы в инверторном режиме с углом а, который принимает на этом интервале значения тс/2 — тс — л/2, что соответствует углам Р, равным л/2 —0 —л/2. На рис. 3.37, а, б представлены диаграммы выходных напряжений обеих групп тиристоров UTpl и UTpU, а также графические зависимости углов управления от времени. Так как тиристорные группы имеют одностороннюю проводимость тока, то положительная волна тока формируется тиристорами группы I, а отрицательная — тиристорами группы II. Поэтому при активно-индуктивной нагрузке в течение каждого полупериода выходного напряжения ток будут проводить обе группы. Для примера на рис. 3.37, в представлены кривые первых гармоник тока /1н и напряжения и1н на выходе преобразователя (в уменьшенном относительно рис. 3.37, а и б масштабе) при активно-индуктивной нагрузке с коэффициентом мощности costp. На интервале 0 — 9 имеет место инвертор-ный режим На и ток проводят тиристоры группы II, далее ток начинают проводить тиристоры группы I, работающие в выпрямительном режиме 1а на интервале 9j — л. С момента 9 = л тиристоры группы I переходят в инверторный режим 16 и т. д. При таком способе управления содержание высших гармоник в выходном напряжении значительно уменьшается, так как его, форма становится близкой к синусоиде, на которую наложены пульсации. Последние уменьшаются с ростом частоты и увеличением числа фаз питающей сети. Основными недостатками рассмотренного способа управления являются сложность системы управления и повышение потребляемой из сети реактивной мощности. ГЛАВА ЧЕТВЕРТАЯ РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ И СТАТИЧЕСКИЕ КОНТАКТОРЫ При питании большинства потребителей электрической энергией требуется регулировать определенные ее параметры — напряжение, ток, частоту и др. Регулированием называется процесс изменения по заданному закону или поддержание 179 неизменности (стабилизации) какого-либо параметра. Регулирование может быть произведено как вручную, так и автоматически. В схемах питания наиболее часто требуется автоматическое регулирование напряжения с целью его стабилизации на заданном уровне при различных возмущающих воздействиях. Электрические устройства, осуществляющие стабилизацию напряжения в пределах широкого диапазона уровней стабилизации, называются регуляторами-стабилизаторами. Если такое устройство предназначено для стабилизации напряжения в узком диапазоне, то его принято называть стабилизатором. При дальнейшем рассмотрении устройств, схематическое исполнение которых не налагает существенных ограничений на диапазон регулирования, именуются регуляторами, а с ограниченными возможностями изменения выходных параметров — стабилизаторами. Регуляторы-стабилизаторы напряжения, так же как и регуляторы-стабилизаторы других параметров электроэнергии, например тока или частоты, могут рассматриваться как преобразователи электроэнергии в том смысле, что они изменяют (преобразуют) ее параметры и качество. В данной главе рассматриваются преимущественно регуляторы-стабилизаторы напряжения. На выходное напряжение преобразователя электроэнергии влияют различные факторы: изменение входного напряжения и тока нагрузки, температура окружающей среды и др. Поскольку эти факторы вызывают изменения выходного напряжения, их называют возмущающими. Точность поддержания напряжения при воздействии различных возмущающих факторов характеризуется соответствующими параметрами стабилизации. Основным, обычно наиболее сильным возмущающим фактором является изменение входного напряжения регулятора. Стабильность выходного напряжения при изменениях входного характеризуется коэффициентом стабилизации по напряжению kcrV, который определяется следующим выражением: *ЯР = =:=,(4.1) Свх вых где UBX — (Увых—установленные входное и выходное напряжения; ЛЕ/ВХ и ЛЕ/ВЫХ— отклонения входного и выходного напряжений. Так как коэффициент kcrV в общем случае зависит от UBX и ивых, то его значение определяют для t конкретного режима работы (как правило, номинального), т. е. в (4.1) подставляют номинальные значения UBX н и с7вых н. Обычно значение коэффициента kcrV определяется для статического (установившегося) режима работы преобразователя. При определении качества стабилизации в динамическом режиме вводят дополнительные параметры оценки качества (время переходного процесса, его характер и др.). Влияние на выходное напряжение нагрузки учитывается внутренним (выходным) сопротивлением преобразователя ZBH: ZBH = ,(4.2) где (А[/вых)/ — отклонение выходного напряжения, вызванное изменением нагрузки; Л/вых — изменение тока нагрузки. Для переменного тока ZBH является комплексной величиной и определяется в статических режимах работы преобразователя. Для оценки влияния нагрузки на выходное напряжение в динамических режимах также вводят дополнительные параметры оценки, учитывающие характер переходного процесса. В преобразователях с выходом на постоянном токе ZBH может быть выражено как активным, так и комплексным сопротивлением в переходных режимах в зависимости от целей и метода его определения. Внутреннее сопротивление ZBH, определенное в виде активного сопротивления в переходном режиме, называют иногда динамическим или дифференциальным. Значение сопротивления ZBH также зависит от входного напряжения и нагрузки преобразователя, и ее определяют для конкретного режима работы, обычно номинального. Отклонение выходного напряжения, вызванное изменением температуры элементов преобразователя, характеризуют коэффициентом стабилизации напряжения по температуре (кст1])7, измеряемой при неизменных значениях входного напряжения и тока нагрузки: (кСти)г= ду, >(4.3) где (А£/вых)т — отклонение выходного напряжения, вызванное изменением температуры; AT—изменение температуры окружающей среды (в установившемся тепловом режиме это соответствует изменению температуры элементов преобразователя). Обычно к регуляторам-стабилизаторам предъявляются требования стабильности, чтобы при всех возмущающих факторах отклонения выходного напряжения от установленного уровня не превышали значений, определенных для каждого конкретного случая. Особенно жесткие требования по стабильности напряжения предъявляются к регуляторам-стабилизаторам напряжения, используемым в цепях постоянного тока, питающих радиоэлектронную аппаратуру. 0 ... 26 27 28 29 30 31 32 ... 49 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












