Раздел: Документация
0 ... 27 28 29 30 31 32 33 ... 49 В настоящей главе помимо регуляторов-стабилизаторов рассматриваются также различные типы статических контакторов. Последние по своему схемному исполнению и элементной базе сходны с отдельными узлами некоторых типов полупроводниковых регуляторов-стабилизаторов и других устройств преобразовательной техники. Поэтому их изучение также входит в курс преобразовательной техники. 4.1. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ Большинство статических регуляторов-стабилизаторов по составу элементной базы силовой части схемы и принципу действия можно разделить на две группы: магнитные и магнитно-полупроводниковые. В § 4.1 рассматриваются наиболее распространенные в настоящее время типы регуляторов-стабилизаторов — магнитно-полупроводниковые. Устройства, используемые обычно для регулирования напряжения в узком диапазоне, именуются при дальнейшем изложении просто стабилизаторами. Там же, где рассматриваются устройства для глубокого регулирования напряжения, это будет оговорено отдельно. На рис. 4.1, а представлена схема стабилизатора, состоящего из двух последовательно включенных автотрансформаторов AT] и АТП, имеющих разные коэффициенты трансформации. На магнитопроводах каждого автотрансформатора имеются обмотки управления wyl и и>у11, в которые включены диоды VDi — VD4 и транзисторы VTX и VT2. Если какой-либо из транзисторов открыт, то он закорачивает обе половины соответствующей обмотки управления. Например, когда открыт транзистор VTX, то закорачивается обмотка wyl (в одну полуволну входного напряжения через диод VD\ и транзистор VTi, а в другую — через диод VD2 и транзистор VTi). Автотрансформатор с закороченной обмоткой управления име- и8ых 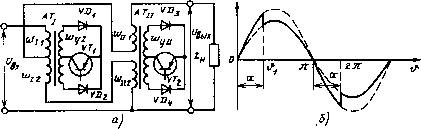 Рис. 4.1. Стабилизатор напряжения с транзисторами, шунтирующими обмотки управления: а—схема; б—диаграмма выходного напряжения ет меньшее сопротивление, чем автотрансформатор с разомкнутой обмоткой управления. Это вызывает перераспределение входного напряжения Um между автотрансформаторами. В результате происходит изменение коэффициента трансформации Ат, связывающего входное и выходное напряжения стабилизатора (кт— ивых/ UBX). При этом коэффициент трансформации принимает следующие значения: на интервале, когда закорочена обмотка и>у1, на интервале, когда закорочена обмотка wyll, wn+wl2 На рис. 4.1,6 представлена диаграмма выходного напряжения стабилизатора, поясняющая его работу. На этой диаграмме на интервале 0 — 0t закорочена обмотка управления wyl и выходное напряжение соответствует коэффициенту трансформации кт. На интервале $t—тс транзистор VTX выключается, a VT2 включается, закорачивая обмотку wyll. В результате выходное напряжение принимает значение, соответствующее коэффициенту к. Далее переключения транзисторов периодически повторяются на каждом полупериоде выходного напряжения. Очевидно, что при изменении длительности интервала 0 — 0t (угла управления а) выходное напряжение изменяется в диапазоне, определяемом коэффициентами кт и к. Следовательно, в стабилизаторе данного типа возможно плавное регулирование выходного напряжения. В качестве ключевых элементов, закорачивающих обмотки управления автотрансформаторов, могут также использоваться тиристоры. Однако поскольку они являются не полностью управляемыми элементами, необходимо предусматривать устройства принудительной коммутации тиристоров. Скачкообразное изменение коэффициентов трансформации в стабилизаторе приводит к искажению формы кривой его выходного напряжения. Улучшение формы кривой может осуществляться за счет фильтров. Габариты фильтра могут быть существенно уменьшены, если применить высокочастотную коммутацию транзисторов, шунтирующих обмотки управления иу1 и иуИ. Иначе говоря, если в пределах каждого полупериода изменять коэффициент трансформации многократно (20—30 раз), то в выходном напряжении будут преобладать высокочастотные гармонические составляющие, которые легче фильтруются. Полупроводниковые приборы могут быть использованы для непосредственной коммутации токов нагрузки при переходе 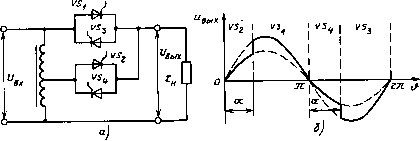 Рис. 4.2 Стабилизатор напряжения с тиристорами, переключающими отпайки автотрансформатора: о—-схема, б—диаграмма выходного напряжения при активной нагрузке с одной отпайки трансформатора на другую. На рис. 4.2, а представлена упрощенная схема стабилизатора, отпайки автотрансформатора которого переключаются тиристорами VSX, VS3 и VS2, VS4. Стабилизация выходного напряжения в данной схеме осуществляется изменением моментов переключения отпаек автотрансформатора. В положительный полупериод входного напряжения в проводящем состоянии могут находиться тиристоры VSi или VS2, а в отрицательный—VS3 или VS4. Коммутация тиристоров в такой схеме происходит под воздействием напряжения автотрансформатора. Для обеспечения естественной коммутации тиристоров необходимо, чтобы переключение производилось на отводы с более высоким потенциалом. Например, в положительную полуволну выходного напряжения сначала включается тиристор VS2, а затем VSy. В этом случае при включении тиристора VSt образуется короткозамкнутый контур, в котором развивается ток, направленный встречно току нагрузки, протекающему через тиристор VS2. В результате тиристор VS2 выключается и ток начинает проводить тиристор VSi. Регулирование действующего значения выходного напряжения может в данной схеме производиться плавно за счет изменения моментов переключения тиристоров. На рис. 4.2,6 представлена диаграмма выходного напряжения стабилизатора при чисто активной нагрузке. При активно-индуктивной нагрузке возникает необходимость в усложнении системы управления тиристорами. Это объясняется тем, что ток нагрузки будет отставать от напряжения на обмотке автотрансформатора, а выключение тиристоров происходит в моменты прохождения тока нагрузки через нуль. Встречно-параллельно включенные тиристоры могут непосредственно использоваться в качестве регуляторов-стабилизаторов напряжения (рис. 4.3, а). Когда входное напряжение UBX положительно, подается управляющий импульс на тиристор VSi. Момент подачи управляющего импульса определяется 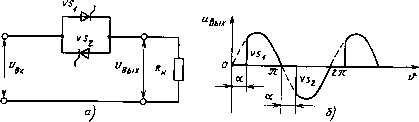 Рис. 4 3 Стабилизатор напряжения на встречно-параллельно включенных тиристорах: а—схема, б—диаграмма выходного напряжения при активной нагрузке углом управления а (рис. 4.3, б). В отрицательный полупериод ток нагрузки проводит тиристор VS2, который также включается в момент, определяемый углом а. Выключение тиристоров VSi и VS2 происходит при снижении протекающего через них тока нагрузки до нуля. Если нагрузка чисто активная, то форма кривой тока нагрузки совпадает с кривой входного напряжения. При активно-индуктивной нагрузке в связи с отставанием тока от напряжения тиристоры VSi и VS2 будут выключаться позже. В качестве примера, поясняющего работу такого стабилизатора на нагрузку индуктивного характера, можно привести схему компенсатора реактивной мощности (см. рис. 3.25), принцип действия которой подробно рассмотрен в § 3.4. Регуляторы-стабилизаторы, выполненные на основе схем со встречно-параллельно включенными тиристорами, являются сравнительно простыми и экономичными, имеют малые габариты небольшую массу и позволяют регулировать выходное напряжение в широких пределах. Наиболее существенным недостатком является значительное искажение формы кривой выходного напряжения. Кроме того, при необходимости регулирования выходного напряжения до значений, превышающих входное напряжение, в схеме обязательно должен присутствовать трансформатор или автотрансформатор. Используя реактивные элементы (конденсаторы и реакторы) в сочетании с тиристорами, можно получить бестрансформаторную схему стабилизатора, имеющего выходное напряжение большее, чем входное (рис. 4.4, а). Принцип действия схемы поясняется векторной диаграммой (рис. 4.4,6). Входное напряжение UBX равно геометрической сумме выходного напряжения £/вых и напряжения на реакторе AUL. Если изменять входной ток /вх, то будут изменяться напряжение AUL и напряжение £/вых. При этом выходное напряжение вых можно регулировать так, что его значение станет либо меньше, либо больше (7ВХ. Угол сдвига срвх между входным током /вх и напряжением UBX определяется коэффициентом 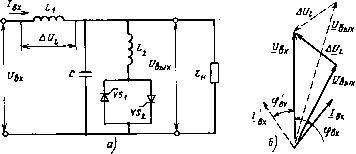 Рис 4.4. Стабилизатор напряжения с регулируемой индуктивностью: а- схема, б векторная диаграмма напряжений и токов мощности нагрузки coscp„, емкостью конденсатора С и эквивалентным значением индуктивности /.экв цепи, состоящей из тиристоров VSt, VS2 и индуктивности реактора L2. Эквивалентное значение индуктивности этой цепи, в свою очередь, зависит от угла управления ос (см. § 3.4). При изменении угла а от нуля до тс/2 значение L3KB изменяется от бесконечности (когда ток через L2 равен нулю) до L2 (когда каждый тиристор открыт в течение полупериода). Следовательно, изменяя угол ос, можно изменять угол срвх, который при этом принимает значения, соответствующие как индуктивному характеру входного сопротивления (toL3KB меньше 1 /соС), так и емкостному (toL3I(B больше 1 /соС). При емкостном угле срвх ток /вх опережает входное напряжение (на рис. 4.4,6 векторы тока и напряжений для этого случая показаны пунктиром), а при индуктивном — отстает. Из рис. 4.4, 6 видно, что при емкостном значении срвх выходное напряжение (Увых стабилизатора становится по значению больше входного UBX, а при индуктивном — меньше. Таким образом, изменяя угол управления ос, можно регулировать выходное напряжение и, в частности, стабилизировать его при колебаниях входного напряжения и тока нагрузки. Основным достоинством рассматриваемой схемы является малое искажение формы выходного напряжения благодаря наличию конденсатора С. Однако установленные мощности конденсатора и реактора L2 относительно велики (в 2—3 раза выше номинальной мощности нагрузки). 4.2. РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ ПОСТОЯННОГО ТОКА Регуляторы-стабилизаторы напряжения или других параметров электроэнергии в цепях постоянного тока выполняются преимущественно на основе полупроводниковых приборов. 186 Большинство типов регуляторов-стабилизаторов по принципу действия могут быть разделены на две группы: параметрические (разомкнутые) и с обратной связью (замкнутые). Последние могут быть непрерывного и дискретного (импульсного) действия. 4.2.1. ПАРАМЕТРИЧЕСКИЕ СТАБИЛИЗАТОРЫ Параметрические стабилизаторы напряжения являются наиболее простыми стабилизирующими устройствами, широко применяемыми в микроэлектронике. Особенно большое распространение они получили в различного рода электронных устройствах для стабилизации напряжений питания отдельных функциональных узлов схемы. В основе принципа действия параметрических стабилизаторов напряжения лежит использование свойств нелинейности некоторых полупроводниковых приборов: стабилитронов, диодов и пр., вольт-амперная характеристика которых обладает большой крутизной. На рис. 4.5, а представлена простейшая схема однокаскад-ного параметрического стабилизатора, выполненного на стабилитроне VD. Резистор гб выполняет роль балластного сопротивления, ограничивающего ток в стабилитроне и воспринимающего избыток напряжения х источника питания. На рис. 4.5,6* показаны вольт-амперные характеристики стабилитрона (кривая 1) и нагрузки (прямая 2, проведенная под углом aH = arctg ./?„). Суммируя их ординаты, получаем зави- / симость входного тока /вх от выходного напряжения 11вых (кривая 3). На том же графике представлено зеркальноеотображение вольт-амперной характеристики балластного сопротивления гб (прямая 4, пересекающая ось абсцисс „„спа н х Рис Параметрический стабилизатор. В ТОЧКе, соответствующей а схема; б —вольт-амперные характеристики ВХОДНОМУ напряжению UBX, схемы 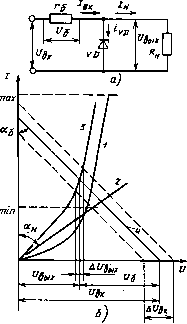 0 ... 27 28 29 30 31 32 33 ... 49 |












