Раздел: Документация
0 ... 28 29 30 31 32 33 34 ... 49 и проведенная под углом a6=arctgr6). Штриховой линией на рис. 4.5 показано изменение положений прямой 4, вызванное отклонениями входного напряжения АС/ВХ. При этом изменение выходного напряжения С/вых будет значительно меньше за счет нелинейности кривой 3. Приближенно коэффициент стабилизации в данной схеме определяется по формуле *ст17*(,6»ыж)/ДдС.х,(4-4) где Ra — динамическое сопротивление стабилитрона. Для обеспечения нормального режима стабилизации необходимо, чтобы ток в стабилитроне находился в диапазоне сттт ст Л>тmax > где ICTmin и /стпшх—допустимые значения токов в стабилитроне, которые обычно указываются для каждого типа стабилитрона. 4.2.2. СТАБИЛИЗАТОРЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ Принцип действия регуляторов-стабилизаторов с непрерывным регулированием основан на зависимости вольт-амперной характеристики транзистора от базового тока. Благодаря этому свойству транзистор можно рассматривать как резистор с регулируемым сопротивлением, которое определяется током базы. В качестве регулируемого сопротивления транзистор (или группа транзисторов) может быть включен последовательно или параллельно с нагрузкой (рис. 4.6) и выполнять функции основного исполнительного органа в процессе регулирования (стабилизации) выходного напряжения. В схеме на рис. 4.6, а с ростом входного напряжения сигнал, поступающий на базу транзистора VT от системы управления СУ стабилизатора, увеличивает сопротивление перехода коллектор — л икэ 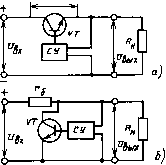
») Рис. 4.6. Схемы стабилизаторов с непрерывным регулированием: а — последовательное включение регулирующего элемента, б—параллельное включение регулирующего элемента; в — структурная схема системы управления СУ эмиттер транзистора до такого значения, когда падение напряжения на транзисторе AUCE не станет равным (с точностью, обусловленной в основном схемой СУ) изменению входного напряжения ДС/ВХ. При уменьшении UBX сопротивление транзистора уменьшается и соответственно уменьшается падение напряжения на нем. Таким образом, регулируя падение напряжения на транзисторе, можно стабилизировать выходное напряжение. В схеме 4.6,6 транзистор VT включен параллельно нагрузке и дополнительно введено балластное сопротивление гб. В данной схеме стабилизация выходного напряжения осуществляется за счет перераспределения входного напряжения ГУВХ между сопротивлениями г6 и гСЕ (сопротивление между коллектором и эмиттером транзистора VT) при регулировании гСЕ СУ стабилизатора. С ростом входного напряжения С/вх уменьшается сопротивление гСЕ, а падение напряжения на сопротивлении г6 увеличивается; с уменьшением входного напряжения происходит обратный процесс. Регулирование падения напряжения на гб позволяет стабилизировать выходное напряжение. В качестве основного регулирующего элемента обычно используют мощные силовые транзисторы, которые соединяют параллельно между собой в количестве, определяемом мощностью стабилизатора. В настоящее время стабилизаторы подобного типа выполняются, как правило, на мощности от долей ватта до нескольких киловатт. Системы управления стабилизаторов могут иметь различное схемное исполнение, но в основе их обычно лежит принцип регулирования систем с замкнутой обратной связью. Такая система в* самом общем виде состоит (рис. 4.6, в) из датчика выходного напряжения 1, сравнивающего устройства 2 и усилителя постоянного тока 3. Принцип регулирования заключается в следующем. Предположим, что входное напряжение стабилизатора изменилось на AUBX. В результате начинает изменяться выходное напряжение стабилизатора С/Вых. Это изменение регистрируется датчиком выходного напряжения 1. Напряжение Ua с датчика 1 поступает в звено 2, где сравнивается с эталонным напряжением U0-. Разность этих напряжений е поступает в усилитель 3, который усиливает это напряжение до AUP. С выхода усилителя напряжение AUP подается непосредственно (или через согласующее устройство) на исполнительный орган 4, в качестве которого, как уже отмечалось, используются силовые транзисторы. Действительное значение выходного напряжения будет несколько отличаться от установленного значения. Эта разность зависит от коэффициента усиления цепи обратной связи (в основном звена 3). Поскольку в процессе регулирования происходит сравнение 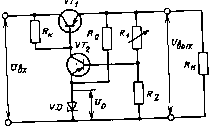 Рис 4 7 Схема стабилизатора компенсационного типа выходного и эталонного напряжений, как в приборах для точного измерения напряжения — компенсаторах, стабилизаторы подобного типа иногда называют компенсационными *. В простейшей схеме компенсационного стабилизатора (рис. 4.7) функции усилительного и сравнивающего звеньев выполняет один транзистор --- «"ггмлттт. VT2, в качестве датчика используется делитель из сопротивлений и R2, а опорное напряжение U0 задается стабилитроном VD. Коэффициент стабилизации выходного напряжения такого стабилизатора приближенно определяется по формуле (4.5) <-ст<7 Л+гСЕ?>2 #1*2 где U0 — опорное напряжение стабилитрона VD; Rmi и Рг — входное сопротивление и коэффициент усиления по току транзистора VT2. Существует много модификаций схем рассмотренного типа, отличающихся в основном системой управления, в частности числом транзисторов усилительного звена и использованием в схеме дополнительных источников питания элементов системы управления. На основе рассмотренных принципов регулирования могут быть также созданы стабилизаторы тока. В схемах стабилизаторов тока вместо датчика напряжения вводится датчик выходного тока (или тока нагрузки), который контролирует отклонение последнего от заданного значения. Компенсационные стабилизаторы непрерывного действия могут обеспечить высокий коэффициент стабилизации напряжения (или тока). Кроме того, они по принципу своего действия снижают пульсацию выходного напряжения, являясь одновременно фильтром для переменной составляющей. Существенным их недостатком является низкий КПД и, как следствие этого, плохие массогабаритные показатели. • Исорнчески слоилось, что под .омпеношинный сг*»»>«»Р™ 4.2.3. ИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ В основе работы импульсных или ключевых регуляторов напряжения лежит следующий принцип. Предположим, что нагрузка подключена к источнику напряжения через ключевой элемент К (рис. 4.8, а), который периодически замыкается и размыкается. Времена замкнутого (/3) и разомкнутого (/р) состояний ключа можно автоматически изменять, воздействуя на него сигналами, поступающими из системы управления СУ. В результате к нагрузке будет приложено импульсное напряжение, форма которого соответствует диаграмме, представленной на рис. 4.8,6. Очевидно, что среднее значение напряжения на нагрузке будет зависеть от соотношения времен замкнутого и разомкнутого состояний ключа К. Согласно определению среднего значения напряжения можно записать з Ud=~Ux(t)dt==uJ-iuBXA, J3 "Г р1 (4.6) где Ud — среднее значение напряжения на нагрузке; Т—период переключения ключа К; /—частота переключения ключа К. Отношение q = T/t3 называют скважностью работы ключа. Изменяя скважность q, можно регулировать выходное напряжение на нагрузке. Регулирование напряжения в рассматриваемой схеме за счет изменения скважности можно рассматривать как модуляцию входного напряжения ключом К. Возможны три способа модуляции входного напряжения: 1)шмротно-импульсная модуляция (ШИМ), когда время /, — переменное, а частота /—постоянная; 2)частотно-импульсная модуляция (ЧИМ), когда время /*, — постоянное, а частота /—переменная; 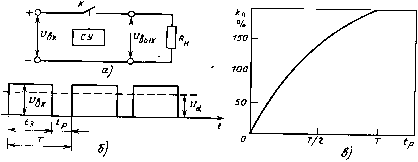 Рис 4 8 Импульсный регулятор с последовательным ключевым элементом. « жвивалентная схема, б—диаграмма выходного напряжения на нагрузке, в—зависимость коэффициента пульсаций от времени разомкнутого состояния ключа 3) широтно-частотная модуляция, когда время t3 и частота f—переменные. Система автоматического управления ключом может быть выполнена как с цепью обратной связи (регулирование по отклонению), так и без цепи обратной связи, с контролем входного напряжения (регулирование по возмущению). В этих случаях ключевой регулятор можно считать регулятором компенсационного типа. Кроме того, существует класс ключевых регуляторов с регулированием релейного типа. В таких преобразователях сигнал в цепи обратной связи, подаваемый на исполнительный орган (в данном случае ключ К), изменяется скачком, когда сигнал рассогласования эталонного и контролируемого напряжений становится равным нулю. При расчете ключевых регуляторов чаще всего используются следующие параметры: 1)среднее значение выходного напряжения Ud = UBX(T—tp) j Т, определяемое по (4.6), и его относительное значение N=Ud/UBX = (T-tp)/T; 2)действующее значение выходного напряжения и его относительное значение 3) коэффициент формы к ф и. (4.8) 4) коэффициент пульсаций Цш(4.9) U. где Ulm — амплитуда первой гармоники кривой выходного напряжения, которая определяется из разложения в гармонический ряд импульсного напряжения. Коэффициент пульсаций увеличивается с ростом скважности q, т. е. при увеличении времени разомкнутого состояния ключа tp. На рис. 4.8, в представлена зависимость кп от /р, из которой видно, что он может при работе регулятора изменяться в диапазоне от нуля до двух (или до 200% в процентном исчислении). Следует отметить, что определение (4.9) не Рид 4 9. Импульсный стабилизатор с параллельным ключевым элементом 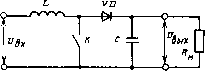 учитывает высшие гармоники в кривой выходного напряжения, амплитуды которых также существенно увеличиваются с ростом скважности, затрудняя фильтрацию переменной составляющей в целом. В некоторых схемах ключевой элемент может быть включен непоследовательно, параллельно нагрузке, как это показано на рис. 4.9. Сущность регулирования напряжения в таких схемах аналогична, но сами схемы и электромагнитные процессы в регуляторах с параллельным ключом значительно отличаются от схем и процессов, протекающих в регуляторах с последовательным ключевым элементом. Поскольку напряжение после ключевого элемента носит явно выраженный импульсный характер, в ключевых регуляторах устанавливаются фильтры, состоящие из реактивных элементов — индуктивностей и емкостей. Назначение выходных фильтров — отфильтровать переменную составляющую напряжения, уменьшив тем самым коэффициент пульсаций напряжения, на нагрузке. Помимо выходных фильтров, некоторые типы регуляторов содержат входные фильтры, предназначенные для уменьшения пульсаций тока, потребляемого от источника постоянного тока. В большинстве схем ключевых регуляторов параметры фильтра определяют характер электромагнитных процессов, протекающих в схеме, и расчет их имеет свои особенности. Остановимся более подробно на основных расчетных соотношениях и процессах, характеризующих работу ключевых регуляторов. Рассмотрим сначала схему с последовательным ключевым элементом (например, транзистором) и Г-образным LC-фильтром Ф, получившим наибольшее практическое распространение (рис. 4.10, а). Предположим, что в момент времени / = 0 транзистор VT перешел в открытое состояние. Под воздействием разности входного напряжения и напряжения на конденсаторе (которое совпадает с напряжением на нагрузке UBblx) начинает нарастать ток iL. Полагая транзистор идеальным ключевым элементом, падение напряжения на котором равно нулю, и пренебрегая пульсацией напряжения на конденсаторе, которая практически мала, получаем уравнение (4.10) 0 ... 28 29 30 31 32 33 34 ... 49 |












