Раздел: Документация
0 ... 33 34 35 36 37 38 39 ... 49 нии в режимах малых нагрузок. Это обусловливается тем, что длительность перезаряда коммутирующей емкости Сх увеличивается с уменьшением тока перезаряда, т. е. тока нагрузки. Другим недостатком является дополнительная загрузка основного тиристора VS по току в период подготовки конденсатора Сх к коммутации, когда происходит его перезаряд, вызванный включением тиристора VSX. Кроме того, в момент выключения тиристора VS на нагрузке возникает всплеск напряжения приблизительно двукратной величины относительно значения входного напряжения UBX (рис. 4.25,6). Зависимость длительности коммутационного процесса от тока нагрузки можно существенно уменьшить, если в схему ввести дополнительный контур перезаряда коммутирующего конденсатора, состоящий из диода VD2 и реактора L2 (рис. 4.25, в). Наличие дополнительного контура приводит к тому, что в момент включения коммутирующего тиристора VSX конденсатор Сх будет перезаряжаться не только током нагрузки iH, но и током в колебательном контуре Сх— VSX — VD2 — L2. При этом длительность перезаряда конденсатора не может быть меньше половины периода колебательного процесса в этом контуре при любых токах нагрузки, включая холостой ход. Всплески напряжения на нагрузке не всегда могут быть допустимы. На рис. 4.26, а представлена схема, свободная от этого недостатка. Чтобы подготовить схему к работе, необходимо зарядить конденсатор Сх. Для этого подается управляющий импульс на тиристор VSX, через который и цепь нагрузки конденсатор заряжается с полярностью, указанной на рис. 4.26, а. Включение контактора осуществляется 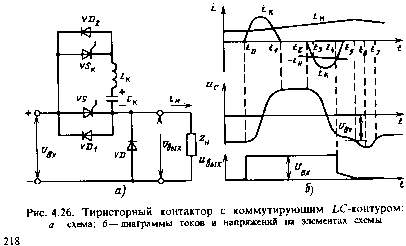 подачей в момент времени г0 (рис. 4.26, б) управляющего импульса на основной тиристор VS. Одновременно начинается перезаряд конденсатора Сх по контуру CX — LX—VD2—VS. Когда полуволна перезарядного тока /„ спадает до нуля (момент времени rj, диод VD2 выключается и конденсатор Ск оказывается заряженным с полярностью, противоположной указанной на рис. 4.26, а, т. е. подготовленным для коммутации тиристора VS. Для выключения тиристора VS в момент времени t2 подается управляющий импульс на тиристор VSX. При включении тиристора VSt начинается колебательный процесс в контуре Ск— VS— VSX — LX. При этом через тиристор VS будет протекать разность токов нагрузки /н и разрядного тока контура ix. Когда эти токи станут равными (момент времени /3), тиристор VS выключится. Далее ix продолжает возрастать, и через диод VDX будет проходить разность токов ix и iH. Пока диод VDX проводит ток, к тиристору VS будет приложено обратное напряжение, равное прямому напряжению на диоде VD1. На этом интервале времени тиристор VS выключается. Когда ток ix снова станет меньше тока нагрузки iH (момент времени zt), диод VDX выключится. Далее происходит дозаряд конденсатора С% током нагрузки /н по цепи VSX — Lx—Сж — ZH до значения входного напряжения UBX. После этого включается диод VD, шунтирующий цепь нагрузки (момент времени t5). Так как в момент времени t5 ток ix отличен от нуля, то энергия, запасенная в индуктивности Lx, расходуется на дальнейший рост напряжения на конденсаторе Сх до значения, большего напряжения UBX. После спадания тока в индуктивности Lx до нуля включается диод VD2 (момент времени t6) и конденсатор Сх разряжается до напряжения * несколько меньшего, чем входное напряжение UBX (момент времени г7). Значения напряжений на конденсаторе Ск в различные моменты процесса коммутации равны: в момент времени t6 uc=U +L /—• V cV в момент времени t1 itc= UBX  (4.41) Если источник входного напряжения имеет однонаправленную проводимость (например, выпрямитель), то разряд конденсатора Сх в обратном направлении становится невозможным и процесс изменения напряжения на конденсаторе заканчивается в момент времени t6, когда ток индуктивности L% становится равным нулю. Положительными свойствами рассмотренной схемы является отсутствие перенапряжений не только в цепи нагрузки, но и на тиристорах, к которым прикладывается только прямое напряжение, практически не превышающее входное напряжение £УВХ. Кроме того, нарастание и снижение токов в полупроводниковых элементах происходят плавно (за исключением нарастания прямого тока тиристора VS), что улучшает условия их работы в схеме и уменьшает возможность выхода из строя. ГЛАВА ПЯТАЯ СИСТЕМЫ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЬНЫМИ УСТРОЙСТВАМИ 5.1. ОБЩИЕ СВЕДЕНИЯ Под системой управления (СУ) преобразовательного устройства в широком смысле понимают совокупность функциональных узлов и элементов, обеспечивающих: 1)управление ключевыми элементами силовой части преобразователя, осуществляющими процесс преобразования электроэнергии; 2)регулирование выходных параметров преобразователя; 3)включение, отключение преобразователя и распределение электроэнергии между отдельными потребителями; 4)управление защитными устройствами преобразователя и его компонентов; 5)выдачу информации о работе преобразователя при использовании его в автоматизированной системе электропитания. Систему контроля работоспособности преобразователя и его компонентов также иногда относят к системе управления. В данной главе рассматриваются характерные узлы и блок-схемы основной части СУ различных типов тиристорных преобразователей и некоторых других устройств силовой электроники. К основной части относятся функциональные узлы и элементы, которые обеспечивают управление нелинейными элементами (например, тиристорами), выполняющими непосредственно функции преобразования и регулирования параметров электрической энергии. При дальнейшем изложении под СУ в большинстве случаев понимается ее основная часть. В тиристорных преобразователях основная функция СУ заключается в формировании по определенной программе управляющих импульсов на управляющих электродах тиристоров схемы. Требования, предъявляемые к параметрам управляющих импульсов, определяются типом тиристора, схемой, в которой используется тиристор, и режимом его работы. Для надежного включения тиристора необходимо обеспечить такие значения тока управления и напряжения на управляющем электроде, которые соответствуют области гарантированного включения тиристора с учетом максимально допустимых значений тока, напряжения и пиковой мощности, выделяемой на управляющем электроде (см. § 1.1). В зависимости от схемы, в которой используются тиристоры, управляющие импульсы могут иметь различную форму и длительность. Наиболее распространенная форма управляющих импульсов—прямоугольная. Минимальная длительность управляющих импульсов определяется временем, необходимым для нарастания тока в анодной цепи до значения тока включения тиристора, который обычно в 2—3 раза превосходит ток выключения. Это время при активном сопротивлении коммутируемой тиристором цепи практически совпадает с временем включения тиристора, т. е. находится в диапазоне от единиц до нескольких десятков микросекунд. Наличие индуктивности в анодной цепи может существенно увеличить минимально необходимую длительность управляющего импульса по сравнению с временем включения тиристора. Для обеспечения нормальной работы тиристоров в ряде схем требуются широкие управляющие импульсы, длительность которых обычно определяется частотой переключения тиристоров и особенностями работы схемы. Например, в трехфазном мостовом управляемом выпрямителе при работе в режиме с прерывистым током нагрузки или при запуске выпрямителя необходимо, чтобы управляющие импульсы присутствовали * одновременно на двух тиристорах: одном из анодной группы, а другом из катодной. Это обусловлено необходимостью образования цепи протекания тока нагрузки id при включении очередной пары тиристоров, которые находятся в выключенном состоянии из-за снижения тока id до нуля. Одновременное присутствие управляющих импульсов на соответствующей паре тиристоров анодной и катодной группы может быть обеспечено, если длительность импульсов будет больше, чем t=T/6, где Т—период переменного напряжения на входе выпрямителя. В данном случае задача может быть решена и другим путем. Например, подачей на каждый тиристор сдвоенных узких управляющих импульсов, первый из которых соответствует очередному включению тиристора согласно порядку коммутации тиристоров в схеме, а другой—повторному (в момент включения очередного тиристора противоположной группы). Однако во многих схемах формирование широких импульсов оказывается проще, чем ряда узких, особенно если моменты их формирования должны находиться в зависимости от режима работы преобразователя. Основным недостатком управления широкими импульсами является увеличение объема и массы импульсных трансформаторов в СУ, а также потерь в тиристоре. Существенным параметром управляющих импульсов является также крутизна переднего фронта импульса, которая влияет на время включения тиристора и допустимую скорость нарастания прямого тока diT/dt. Для лучшего использования тиристоров длительность переднего фронта управляющего импульса должна быть около 1 мкс. Крутизна переднего фронта управляющего импульса является важным параметром и для импульсов управления транзисторами, используемыми в схемах преобразователей в качестве ключевых элементов. При управлении тиристорами на интервале, когда отсутствуют управляющие импульсы, желательно на управляющие электроды тиристоров подавать небольшое отрицательное смещение. Запирающее напряжение позволяет повысить устойчивость тиристоров к ложным управляющим импульсам. В настоящее время СУ тиристорных преобразователей выполняются на основе полупроводниковых и магнитных элементов. Из последних преимущественно используются импульсные трансформаторы, применяемые для развязки цепей СУ и силовой части преобразователя. С развитием микроэлектроники широкое применение в СУ находят различные типы гибридных и интегральных полупроводниковых схем (ИС). По принципу обработки сигналов ИС делятся на аналоговые и цифровые. В аналоговых ИС выходной и входной сигналы связаны непрерывной функцией, например линейной. В цифровых ИС (иногда называемых дискретными ИС) входной и выходной сигналы являются дискретными, например импульсами напряжения. Среди аналоговых ИС в СУ могут быть успешно использованы многоцелевые высококачественные усилители, получившие название операционных (например, усилители серий К140 и К544). Из цифровых ИС, применяемых в СУ, следует отметить схемы транзисторно-транзисторной логики (ТТЛ) серий К564 и К561, а также схемы на металлоокисных полупроводниковых (МОП) транзисторах (например, серии К172). Последние обладают более высокими уровнями напряжения выходного сигнала. Одним из перспективных путей совершенствования СУ является использование микропроцессорной техники. Системы управления, содержащие микропроцессорные комплекты (МПК), позволяют более эффективно решать задачи регулирования выходных параметров и реализовать более глубокий текущий контроль за работой СУ, а также обеспечить более 222 точную диагностику ее узлов и элементов. Основным же преимуществом применения МПК является возможность широкой унификации аппаратных средств СУ. При этом разнообразие функций обеспечивается разработкой соответствующих программ управления. Конструктивно СУ выполняется обычно в виде выдвижных субблоков, состоящих из печатных плат. Как правило, каждая печатная плата является функционально определенным узлом СУ. Соединения между платами, субблоками и силовой частью осуществляются через разъемы. Большое внимание при разработке СУ уделяют вопросам надежности, так как количество элементов СУ значительно превышает количество элементов силовой части. Поэтому надежность преобразователя в основном определяется надежностью его СУ. Особые требования к узлам СУ предъявляют по помехоустойчивости, поскольку они обычно работают в непосредственной близости с силовыми цепями схемы. 5.2. СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЬНЫХ УСТРОЙСТВ В настоящем параграфе рассматриваются некоторые упрощенные структуры СУ различных видов преобразовательных устройств: выпрямителей, преобразователей частоты, автономных инверторов и др. Общим для всех рассматриваемых структурных схем является блок питания, обозначенный на рисунках БП, без указания связей с другими функциональными узлами СУ. \ 5.2.1. СИСТЕМЫ УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЕЙ И ЗАВИСИМЫХ ИНВЕРТОРОВ В самом общем виде структуры СУ выпрямителей, зависимых инверторов и других видов тиристорных преобразователей можно разделить на две группы: многоканальные и одноканаль-ные. В многоканальных структурах СУ регулирование фазы управляющих импульсов (т. е. угла "управления) производится в каждом канале управления. Число таких каналов обычно равно числу тиристоров схемы или числу ее фаз. В одноканаль-ных структурах СУ регулирование фазы управляющих импульсов производится в одном общем для всех фаз канале с последующим распределением импульсов по тиристорам схемы. Подобную классификацию СУ целесообразно проводить Для многофазных преобразователей, содержащих большое число тиристоров. В то же время основной принцип этой классификации справедлив и для однофазных схем. 0 ... 33 34 35 36 37 38 39 ... 49 |












