Раздел: Документация
0 ... 34 35 36 37 38 39 40 ... 49 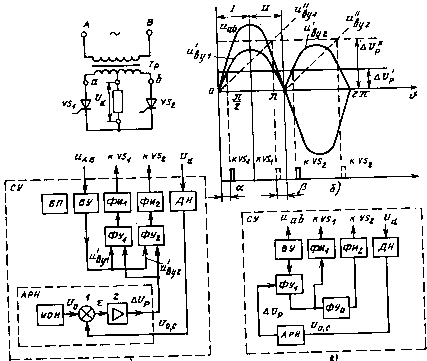 Рис. 5.1. Система управления однофазного выпрямителя: а—структурная схема, б—диаграммы напряжений на входе фазосдвигающих устройств и диаграммы управляющих импульсов, в — одиоканальная структурная схема Наиболее распространенной структурой СУ выпрямителей является многоканальная. Пример СУ с такой структурой для тиристорного выпрямителя, выполненного по однофазной схеме со средней точкой, приведен на рис. 5.1, а. Принцип работы данной СУ основан на формировании управляющих импульсов, следующих синхронно с сетевым напряжением илв и сдвинутых относительно этого напряжения по фазе на угол а. В выпрямителях с регулированием по выходному напряжению (рис. 5.1, б) угол а обеспечивается таким, чтобы среднее значение выпрямленного напряжения Ud мало отличалось от заданного при различных возмущениях, например колебаниях сетевого напряжения илв. Привязка импульсов к сетевому напряжению осуществляется входным устройством ВУ. Функции ВУ в данной СУ может выполнять трансформатор со средней точкой, вторичные полуобмотки которого создают два синусоидальных напряжения, сдвинутых между собой на угол тс. Напряжения с каждой вторичной полуобмотки ВУ поступают на фазосдвигающие устройства ФУХ и ФУ г- Наиболее просто фазосдвигающие устройства в данном случае реализуются на принципе вертикально-фазового управления. В частности, схемы могут быть выполнены так, чтобы обеспечить формирование импульсов в моменты равенства напряжений, поступающих от ВУ и равных иву1 и иву2 с напряжением AUP, поступающим на ФУХ и ФУ2 от автоматического регулятора напряжения ЛРН (рис. 5.1, б). Типовая структурная схема автоматического регулятора напряжения приведена на рис. 5.1, а. Она состоит из источника опорного (эталонного) напряжения ИОН, сумматора 1 и усилителя 2, включающего в себя в общем случае различные звенья динамической коррекции системы автоматического регулирования. В рассматриваемом примере последняя выполнена на принципе использования обратной связи. Напряжение цепи обратной связи U0>c от датчика напряжения ДН поступает на сумматор 1, на вход которого подается также опорное напряжение U0. Разность этих напряжений е (один из сигналов поступает на сумматор с обратным знаком) подается на вход усилителя 2. Выходной сигнал усилителя поступает на входы ФУ, и ФУ2 и далее на формирователи управляющих импульсов ФИХ и ФИ2. Из рис. 5.1, б видно, что AUp определяет моменты формирования управляющих импульсов тиристоров, т. е. угол управления а. Согласно (2.23) чем больше угол а, тем меньше среднее значение выходного напряжения выпрямителя. Эта зависимость позволяет регулировать выходное напряжение, в частности осуществлять его стабилизацию на заданном уровне при различных вЪзмущающих воздействиях. Например, если в результате возрастания входного напряжения начнет увеличиваться выходное напряжение выпрямителя, то усиленный сигнал рассогласования е будет изменять угол а так, чтобы восстановить выходное напряжение на заданном уровне. В результате сигнал е будет стремиться к нулю, а выходное напряжение к значению, заданному опорным напряжением U0 и коэффициентом передачи датчика выходного напряжения ДН. В соответствии с принципом действия рассматриваемой системы регулирования установившееся значение напряжения Ud должно отличаться от заданного, чтобы обеспечить требуемые уровень сигнала е для определенного значения угла а. Значение е будет тем меньше, чем выше коэффициент усиления цепи регулятора, связывающий значения е и ос (зависящий в данном случае преимущественно от коэффициента усиления усилителя 2). Поэтому в установившемся режиме 4 новое значение выходного напряжения будет несколько отличаться 15 № 3658225 от заданного. Но это отличие при больших значениях коэффициента усиления мало. Так как компенсация возмущающих воздействий в системах подобного типа происходит не полностью, а с некоторым отклонением регулируемого параметра от заданного значения (называемым в теории автоматического регулирования статиз-мом), они относятся к статическим системам автоматического регулирования. Статизм может быть уменьшен за счет увеличения коэффициента усиления цепи регулирования. Но это может вызвать неустойчивость процесса регулирования, например автоколебания. С целью повышения устойчивости системы регулирования в нее вводят специальные корректирующие звенья, которые улучшают динамические характеристики системы. Для пояснения принципа действия одноканальных структур СУ на рис. 5.1, в приведен другой вариант СУ. Здесь имеется фазосдвигающее устройство ФУ о, обеспечивающее фиксированный сдвиг по фазе на угол тс сигнала, поступающего на формирователь импульсов ФИ2. Регулирование угла управления а происходит только посредством воздействия сигнала от АРН на ФУХ, т. е. управляющие импульсы синхронизируются по частоте и фазе относительно одной полуволны сетевого напряжения. Для однофазных преобразователей одноканальные структуры усложняют СУ и поэтому обычно не используются. В то же время для многофазных преобразователей применение одноканальных СУ в некоторых случаях может оказаться более выгодным. В § 3.1 было показано, что для обеспечения режима зависимого инвертирования необходимо формировать управляющие импульсы с опережением относительно моментов естественной коммутации тиристоров схемы на угол Р = тс —ос. На рис. 5.1, б показаны диапазоны формирования управляющих импульсов в выпрямительном (I) и инверторном (II) режимах. Очевидно, что при синусоидальной форме напряжения иаЬ затруднительно обеспечить фазовый сдвиг способом вертикально-фазового управления одновременно в диапазонах I и II. Если преобразователь должен работать в обоих режимах, целесообразно выполнить ВУ на основе генератора пилообразного напряжения, выходные напряжения которого "вУ1 и "вУ2 синхронизированы с сетевым (на рисунке эти напряжения, сигнал AUP от АРН и управляющие импульсы для инверторного режима показаны штриховой линией). Использование для сравнения с сигналом AUP пилообразного напряжения позволяет обеспечить регулирование угла ос в диапазоне от 0 до тс, т. е. как в выпрямительном (0 —тс/2), так и инверторном (тс/2 —тс) режимах. Пример многоканальной структуры СУ для трехфазного управляемого выпрямителя приведен на рис. 5.2, а. Она содер- жа г S vs, i vsi \ ySs ис,и-а,ив KVSi ***г "Vs,KV5 kvs.kvsm и \~с</ ФУ. 1 . 5/7 tax. т. Фус Фи. I U L—L 17 ~«\ г ~я rs 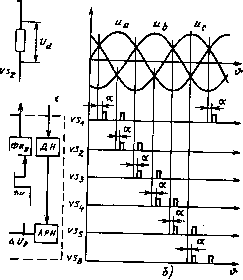 Рис 5 2. Многоканальная система управления трехфазного теля: мостового выпрями- о-структурная схема, б-диаграммы сетевого напряжения и сдвоенных импульсов управляющих жит шесть каналов управления тиристорами. Каждый канал имеет фазосдвигающее устройство ФУ и формирователь импульсов ФИ. Синхронизация импульсов с сетевым напряжением осуществляется входным устройством ВУ, которое одновременно производит распределение синхронизирующих напряжений по каналам. Функции ВУ, в частности, может выполнять трансформатор, имеющий шесть выходных обмоток, образующих шестифазную систему напряжений, сдвинутых на угол тс/3 (рис. 5.3). На входы ФУ поступают как синхронизирующие напряжения от ВУ, так и напряжение AUP от АРН, обеспечивающего регулирование угла управления ос. По принципу действия рассматриваемая структура аналогична структуре, изображенной на рис5.1, а. Для обеспечения пуска и устойчивой работы выпрямителя в режимах с прерывистыми токами следует формировать широкие управляющие импульсы (больше, чем тс/3) или подавать узкие, но сдвоенные. С этой целью вводятся дополнительные связи между каналами управления. Диаграммы следования управляющих импульсов и сетевого напряжения представлены на рис. 5.2, б. Недостатком многоканальной структуры является сложность обеспечения симметрии управляющих импульсов по каналам. Для этой цели обычно предусматривают подрегулировку К VS. к VS. KVS5 «W*Ud. 5/7
Рис 5.3. Одноканальная система управления трехфазного мостового выпрямителя фазовых сдвигов импульсов при наладке СУ в процессе производства и при необходимости в условиях эксплуатации. Асимметрия в углах управления по фазам приводит к появлению низкочастотных пульсаций в выпрямленном напряжении, которые могут отрицательно сказываться на работе потребителя. Структура СУ, изображенная на рис. 5.3, практически не имеет этого недостатка, так как является по существу од-ноканальной. Она состоит из задающего генератора зг, напряжение которого синхронизи ровано с напряжением питающей сети, пересчетно-распреде-лительного устройства пру и формирователей импульсов фих и фи2. Частота зг в 6 раз выше частоты питающей сети; пру осуществляет пересчет частоты выходных импульсов зг на два и распределение их по фих и фи2, один из которых формирует импульсы, поступающие одновременно на тиристоры анодной группы выпрямителя, а другой — на тиристоры катодной группы. Синхронизация работы зг с сетью и стабилизация выпрямленного напряжения осуществляются обратной связью СУ. Для этого выходное напряжение выпрямителя через датчик напряжения дн поступает на арн. Сигнал Д{/р с выхода арн поступает на зг. Характер обратной связи выбирается таким, чтобы при увеличении напряжения aup частота зг увеличивалась. При этом увеличивается угол управления а, что приводит к снижению выпрямленного напряжения. Этот процесс будет продолжаться практически до полного устранения разбаланса напряжений С/ос и u0 (рис. 5.1, а), когда их разность е станет равной нулю. Система автоматического регулирования подобного типа является астатической, т. е. при действующих на выпрямитель возмущениях, например при колебаниях сетевого напряжения, выходное напряжение будет оставаться практически неизменным. Астатический характер системы регулирования, однако, в данной структуре ограничивает быстродействие СУ при резких изменениях возмущающих факторов. Следует отметить, что использование этой структуры СУ в зависимых инверторах связано с рядом трудностей, приводящих к значительному ее усложнению. Достоинствами данного варианта структуры СУ являются простота, надежность, высокая точность стабилизации выход- ного напряжения в статических режимах, высокая степень симметрии в следовании управляющих импульсов. В рассмотренных вариантах структур СУ выпрямителей в качестве регулируемого параметра указывалось среднее значение выпрямленного напряжения ud. При использовании таких СУ в зависимых инверторах в качестве регулируемого параметра обычно выбирается ток (среднее значение на стороне постоянного тока или действующее на стороне переменного тока инвертора). В этом случае датчик напряжения заменяется на датчик тока. В режиме стабилизации по току могут также работать и управляемые выпрямители, например при использовании их в качестве зарядных устройств аккумуляторных батарей. Тогда также необходимо заменить датчик напряжения на датчик тока, сигнал которого пропорционален среднему значению выпрямленного тока 1л. 5.2.2. СИСТЕМЫ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ Структурные схемы СУ преобразователей частоты с непосредственной связью также различаются по способу фазового управления тиристорами на многоканальные и одноканальные, а по принципу регулирования выходных параметров—на статические и астатические. Наибольшее распространение в настоящее время получили многоканальные структуры со статической системой автоматического регулирования. В сравнении со структурными схемами СУ выпрямителей и зависимых инверторов структуры СУ преобразователей частоты с* непосредственной связью являются значительно более сложными. Это объясняется тем, что в общем случае СУ в преобразователях частоты должны реализовать больший объем-логических операций. В частности, управление тиристор-ными группами должно производиться с учетом режима рекуперации реактивной энергии нагрузки в сеть (инверторного режима), исключения уравнительных токов между тиристор-ными группами, модуляции выходного напряжения по определенным законам и др.-Поэтому, учитывая сложность реальных СУ преобразователей частоты с непосредственной связью, рассмотрим в качестве примера простейший вариант структуры СУ трехфазно-однофазного преобразователя, работающего только на активную нагрузку (рис. 5.4, а) и без модуляции выходного напряжения по законам, улучшающим его гармонический состав. Каждая из тиристорных групп рассматриваемого преобразователя представляет собой трехфазный управляемый выпрямитель, выполненный по схеме со средней точкой. Поэтому структура СУ этого преобразователя во многом подобна 0 ... 34 35 36 37 38 39 40 ... 49 |












