Раздел: Документация
0 ... 36 37 38 39 40 41 42 ... 49 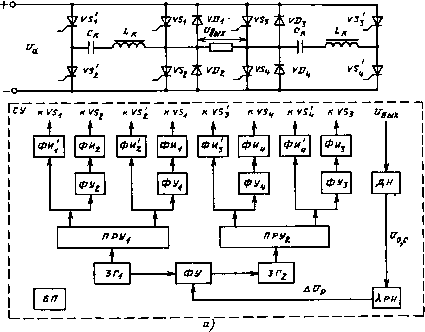 Рис. 5.7. Система управления однофазного инвертора напряжения: приводит к формированию управляющих импульсов для тиристоров VS2 и VSU следующих в таком же порядке. Второе плечо инвертора управляется аналогично. Для обеспечения нормальной работы инвертора необходима синхронизация ЗГХ и ЗГ2. В приведенной структурной схеме синхронизация производится через регулируемое фазосдвига-ющее устройство ФУ, что позволяет производить регулирование выходного напряжения по принципу широтно-импульсной модуляции, для чего сигнал мос цепи обратной связи по выходному напряжению подается на ФУ. Значение сигнала A Up определяет угол фазового сдвига Д9 между управляющими импульсами тиристоров VS\ и VS4 (или VS2 и VS3), а следовательно, и длительность паузы между положительными и отрицательными значениями выходного напряжения (§ 3.4). Система управления трехфазного инвертора подобного типа имеет сходную структуру. Основное отличие заключается в использовании пересчетно-распределительного устройства, 236 ПРЫ1 vs, И -К vs. 4 згг npyt VS, I vs. AB Д0 iL AB AB \ ; vs„ he AB a — структурна схема; 6 — диаграммы импульсов осуществляющего сдвиг по фазе управляющих импульсов основных тиристоров каждого плеча относительно друг друга на угол, равный а. 6.2.4. СИСТЕМЫ УПРАВЛЕНИЯ РЕГУЛЯТОРОВ-СТАБИЛИЗАТОРОВ В гл. 4 рассматривались различные типы регуляторов-стабилизаторов напряжения в цепях постоянного и переменного токов. Среди них в качестве наиболее перспективных были указаны устройства, выполненные на основе силовых полупроводниковых приборов. Поэтому в настоящем параграфе приводятся примеры СУ только полупроводниковых регуляторов-стабилизаторов. Системы управления регуляторов-стабилизаторов переменного тока. Для регулирования напряжения в цепи переменного тока может быть применен компенсатор реактивной мощности, который используется для регулирования выходного напряжения 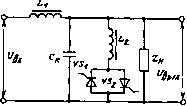 СУ vs. к VS. kVS, ву фи, \фиг 1 А» ФуЛ \ФУг АРН 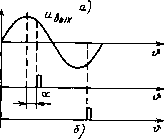 Рис. 5-8. Система управления регулятора-стабилизаторанапряжения с компенсатором реактивной мощности: а—структурная схема; 6—диаграммы выходного напряжения и управляющих импульсов Рис. 5.9. Система управления регулятора-стабилизатора напряжения с ти- ристорным переключением отпаек: а—структурная схема; 6 — диаграммы выходного напряжения и управляющих импульсов  инвертора тока (см. рис. 4.4, а). Принцип регулирования напряжения в таком регуляторе-стабилизаторе основан на изменении его эквивалентной индуктивности (см. § 4.1). Для этого необходимо регулировать угол управления а. Вариант структурной схемы СУ такого регулятора-стабилизатора приведен на рис. 5.8, а. Управляющие импульсы тиристоров VSX и VS2 формируются формирователями импульсов ФИХ и ФИ2- Синхронизация этих импульсов с выходным напряжением «вьи осуществляется входным устройством ВУ, сигналы с которого поступают на фазосдвигающие устройства ФУУ и ФУ2. Одновременно на эти же устройства поступает сигнал At7p от автоматического регулятора напряжения АРН. Напряжение определяет фазу формирования управляющих импульсов относительно входного напряжения, т. е. угол управления а. Выходное напряжение ивых контролируется датчиком ДН, сигнал с которого по цепи обратной связи поступает на АРН. Диаграммы управляющих импульсов и выходного напряжения представлены на рис. 5.8, б. Вариант структурной схемы СУ регулятора-стабилизатора, выполненного на принципе коммутации тиристорами отводов от обмотки трансформатора, приведен на рис. 5.9, а. Регулирование напряжения в схеме производится посредством изменения угла а, определяющего момент переключения нагрузки с отвода, соответствующего напряжению 17вых, на отвод с более высоким напряжением UBUX (рис. 5.9, б). Управляющие импульсы на тиристоры VSX — VS4 поступают с выходов формирователей импульсов ФИХ — ФЙА. Синхронизация управляющих импульсов производится входным устройством ВУ. При этом моменты формирования управляющих импульсов тиристоров VSX и VS2 жестко связаны с напряжением ивх и соответствуют прохождению его через нулевые значения (0, тс, 2тс ...). В то же время управляющие импульсы тиристоров VS3 и VSA сдвигаются фазосдвигающим устройством ФУ на угол а относительно этих моментов. Для того чтобы обеспечить надежную работу схемы при активно-индуктивной нагрузке, необходимо, чтобы длительность импульсов соответствовала, диаграммам, представленным на рис. 5.9. Изменение угла а производится автоматически сигналом ДГ/Р, поступающим от АРН. Системы управления регуляторов-стабилизаторов постоянного тока. Регуляторы-стабилизаторы малой мощности преимущественно выполняются на транзисторах, работающих в режиме непрерывно регулируемого сопротивления. Принцип действия подобного типа регуляторов-стабилизаторов рассмотрен в § 4.3. Согласно этому принципу структурную схему СУ в общем случае можно представить в виде, показанном на рис. 5.10. Процесс регулирования протекает следующим образом. Сигнал 6П К регулирующему транзистору ион 1 ft" Рис. 5.10. Система управления регулятора-стабилизатора постоянного тока непрерывного действия w0jC в цепи обратной связи, поступающей с датчика выходного напряжения ДН, подается на сумматор 1. На его другой вход поступает опорное напряжение U0 от источника опорного напряжения ИОН. Разность этих напряжений е подается на вход усилителя, содержащего необходимые корректирующие цепочки для придания устойчивости процессу регулирования. Сигнал AUP с выхода усилителя подается на транзистор (или совокупность последовательно-параллельно соединенных транзисторов), выполняющий функции исполнительного органа в системе регулирования. По принципу регулирования данная система является статической системой с отрицательной обратной связью, отрабатывающей до минимума при различных возмущениях разность напряжений е, зависящую от коэффициента усиления цепи регулирования. Последний преимущественно определяется коэффициентом усиления усилителя СУ. При повышении мощности регулятора-стабилизатора более рациональным является способ импульсного управления исполнительным органом схемы (§ 4.3). Структурная схема СУ для импульсного управления, например, транзистором VT (см. рис. 4.17, а) (или совокупность транзисторов) представлена на рис. 5.11, а. Включение транзистора производится подачей на него управляющего импульса от ФИ. Момент формирования переднего фронта управляющего импульса совпадает с моментом равенства сигнала UT, поступающего от генератора пилообразного напряжения ГПН и напряжения AUP. Длительность управляющего импульса соответствует интервалу времени, когда напряжение превышает сигнал AUP. Подобная структура СУ позволяет реализовать pei улирование выходного У К регулирующему транзистору V4 I гпн ион [J
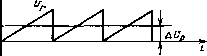 К регулирующему транзистору п п п г) Рис. 5.11. Система управления регулятора постоянного тока: а—структурная схема, б—диаграммы напряжений на элементах схемы и управляющих импульсов напряжения Uam по способу ШИМ. Частота переключения транзистора VT в данном случае постоянна и определяется частотой ГПН. Регулирование выходного напряжения происходит за счет изменения скважности управляющих импульсов, которая определяется сигналом AUP усилителя. Если в качестве исполнительного органа регулятора используются тиристоры, то структурная схема СУ, соответствующая регулированию по способу ШИМ подобна приведенной на рис. 5.11, а. Основное отличие ее заключается в дополнительных каналах формирования управляющих импульсов вспомогательных (коммутирующих) тиристоров. Это обусловлено необходимостью принудительного выключения основных тиристоров (§ 4.3). 5.3. МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ В ПРЕОБРАЗОВАТЕЛЬНОЙ ТЕХНИКЕ Современные средства цифровой вычислительной техники позволяют расширить функции систем управления, регулирования и контроля состояния преобразователей и за счет этого улучшить основные технико-экономические показатели последних. Так, например, могут быть улучшены энергетические, динамические, точностные и надежностные характеристики преобразователей, а также реализованы более совершенные системы контроля, защиты и диагностики. При этом может быть достигнут высокий уровень унификации аппаратных средств различных типов преобразовательных устройств за счет возможности их программирования под конкретные функции и задачи. Основные функции, выполняемые программируемыми средствами вычислительной цифровой техники в преобразователях, являются следующие: 1)реализация законов формирования (моментов появления) управляющих импульсов ключевых элементов преобразователя (тиристоров, транзисторов и др.); 2)управление режимами работы преобразователя (включение, отключение, реверсирование и др.); 3)защита основных узлов и элементов при возникновении внешних или внутренних аварий и повреждений (входных перенапряжений, перегрузок, коротких замыканий, отказов отдельных элементов и др.); 4)контроль и диагностика состояния функциональных узлов и элементов преобразователя (состояние тиристоров, транзисторов, оконечных каскадов в каналах управления, коммутационной аппаратуры, оперативных источников питания и др.); 5)обмен информацией между преобразователем и другими объектами или оператором. 0 ... 36 37 38 39 40 41 42 ... 49 |
||||||||||||||












