Раздел: Документация
0 ... 37 38 39 40 41 42 43 ... 49 Реализация законов следования управляющих импульсов ключевых элементов, как правило, включает в себя процессы автоматического регулирования выходных параметров преобразователя. Кроме того, при необходимости может осуществляться формирование заданного гармонического состава входных и выходных токов и напряжений преобразователя, коэффициента мощности по входу или выходу и другие параметры. Следует также отметить, что благодаря большим возможностям современных вычислительных цифровых средств можно реализовать оптимальные законы регулирования с адаптацией параметров контуров регулирования к режимам работы. Перечисленные функции могут осуществляться системами управления двух иерархических уровней. Система верхнего уровня реализует управление основными режимами работы от внешних централизованных пунктов управления, а система нижнего уровня управляет непосредственно основными элементами преобразователя, обрабатывая информацию, поступающую с различных датчиков. Эффективность использования вычислительных числовых средств в преобразовательной технике стала реальной с созданием больших интегральных микросхем (БИС) и благодаря достижениям микроэлектронной технологии, на основе которых начала интенсивно развиваться микропроцессорная техника. Микропроцессор (МП) — программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управление им, построенное на основе одной или нескольких БИС. Совокупность микропроцессорных и других микросхем, совместимых по конструктивно-технологическому исполнению и предназначенных для совместного использования при построении микропроцессорных систем, называется микропроцессорным комплектом микросхем (МПК). Обычно МПК изготавливается в виде набора типовых корпусов микросхем, имеющих от 28 до 48 внешних выводов. На основе МПК могут создаваться микро-ЭВМ, контроллеры (устройства управления) и другие средства вычислительной техники. Комплекс технических средств ЭВМ должен содержать в своем составе средства обмена данными с пользователем (например, печатающее устройство, видеодисплей и др.). Кроме того, для проведения диалога с пользователем и дальнейшей организации переработки информации ЭВМ должна иметь внутреннее программное (системное) обеспечение. В этом смысле МПК в управляющих системах ориентированы на совместную работу технических устройств и их элементов. В частности, в преобразователях МПК используются, за редким исключением, в качестве составной части управляющих систем и подсистем. В этом смысле более точным для таких устройств и систем будет название микро-УВМ (управляющая вычислительная машина) или микроконтроллер. Последнее понятие часто сужают, понимая под микроконтроллером только устройства чисто логического управления, исключающего процессы вычисления функций, решения уравнений и др., необходимые при реализации сложных законов регулирования. В более широком смысле слова микроконтроллер — это любое устройство управления, выполненное на основе МПК и ориентированное на совместную работу с другими техническими устройствами. 5.31 ТИПОВЫЕ ОБОБЩЕННЫЕ СТРУКТУРЫ МИКРОПРОЦЕССОРА Собственно процессор можно функционально представить в виде двух устройств: операционного и управляющего (рис. 5.12). Операционное устройство ОУ—устройство, в котором выполняются арифметические, логические и другие операции, а управляющее устройство УУ осуществляет управление этими операциями [19]. Входными сигналами УУ являются как сигналы, поступающие от других устройств х5+1, х5+2, так и сигналы обратной связи от ОУ (*! ... xs). Операции в ОУ осуществляются с определенной тактовой частотой, и каждое элементарное действие в течение тактового периода называется микрооперацией. Совокупность микроопераций называется микрокомандой, а набор микрокоманд—микропрограммой. По способу управления различают два типа МП: со схемным (аппаратным) управлением и микропрограммным управлением. В МП первого типа УУ реализуется на основе микросхем с «жесткой» логикой функционирования, которая определяется собственно схемой УУ. Такие МП работают с фиксированными разрядностью и составом команд. Эти устройства позволяют получить наиболее высокое быстродействие, но ограничивают возможности МП, существенно снижая их универсальность. Управление обработкой данных в МП первого типа проводится на основе сравнительно небольшого фиксированного числа команд программы (обычно Ввод данных  Вн ШД
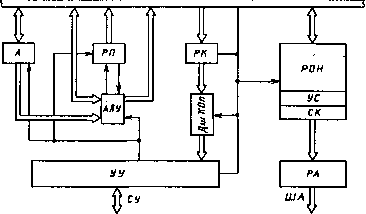 Рис. 5.13. Структурная схема микропроцессора с фиксированной разрядностью 45—90 команд). В МП второго типа реализуется принцип программируемой логики с возможностью наращивания разрядности обрабатываемых слов. Это позволяет расширить список команд и увеличить их число в 1,5—2 раза по сравнению с МП первого типа. Кроме того, появляется возможность повысить универсальность МП за счет изменения программы логики управления ОУ. На рис. 5.13 изображена упрощенная структурная схема МП первого типа (с фиксированной разрядностью) [20]. Ядром процессора можно считать арифметико-логическое устройство АЛУ, выполняющее арифметические и логические операции (сложение, сдвиг, логические И, ИЛИ и др.). Элементы МП сопрягаются между собой через внутреннюю шину данных ВШД, рассчитанную на разрядность сигналов обмена, равную разрядности слов информации МП (в частности, 8-разрядной). Внешние сигналы поступают в МП через внешнюю шину данных ВнШД, такой же разрядности, как и ВШД. В качестве кратковременной (сверхоперативной) памяти используются регистры общего назначения РОН. Кроме того, для кратковременного хранения данных используются: регистр-аккумулятор А, хранящий результаты операций АЛУ; регистр команд РК, указывающий код операции и адрес операнда; регистр признаков РП, содержащий информацию о состоянии МП (признаки переноса, переполнения и др.); буферные регистры данных БРД и адреса, хранящие кратковременно данные по обмену информации между МП и внешними устройствами. Расшифровку кода очередной операции для управляющего устройства УУ выполняет дешифратор кода операций ДшКОп. Адрес очередной команды определяется счетчиком команд СК и регистром адреса РА. Для организации переходов в работе от одной программы к другой и обратно, например по специальному запросу от внешних устройств на прерывание текущей программы, используется стековая память, для которой отводятся специальные регистры или ячейки оперативной памяти. Последовательность считывания данных из стековой памяти определяется указателем стека УС, в котором фиксируется номер очередной незанятой или последней занятой ячейки стека. Порядок считывания данных здесь обратен порядку их записи. Для адресации памяти достаточно большой емкости СК и РА имеют удвоенную по сравнению с РОН разрядность и связаны в рассматриваемом примере соответственно с 16-разрядной внешней шиной адресов ША. Устройство управления в МП первого типа выполнено в виде «жесткой» схемы и рассчитано на определенную систему команд. В соответствии с предусмотренными схемой УУ командами вырабатывается последовательность управляющих сигналов, частота которых определяется обычно отдельным внешним генератором тактовых импульсов ГТИ. Для расширения возможностей МП при решении сложных задач управления могут использоваться МП второго типа— модульного исполнения с изменяемой разрядностью и микропрограммным принципом построения У У. На рис. 5.14 приведена структурная схема такого типа МП [20]. При такой структуре функции оперативного устройства выполняет центральный процессор (ЦП), состоящий из модулей центральных процессорных элементов ЦПЭ„ малой (2—4) разрядности. Эти модули имеют общую шину микропрограммного управления, которая объединяет цепи межразрядных переносов отдельных модулей. Эта структура позволяет расширить систему внешних связей процессора, так как модули имеют разделенные шины данных и несколько независимых входных шин. Разрядность ЦП при такой структуре определяется числом модулей ЦПЭа и их индивидуальной разрядностью. Управляющее устройство с микропрограммным управлением УМУ позволяет реализовывать требуемые наборы управляющих команд и, следовательно, имеет значительно более г Вывод МО Перенос сдвиг 3 цлэ. Данные \упра6ление ОУ УМУ УУ О ввод Рис. 5.14. Структурная схема микропроцессора модульного исполнения с применяемой разрядностью обширную область использования по сравнению с УУ на основе «жесткой» схемы. Для запоминания информации в состав микропроцессорных систем обычно включают модули БИС запоминающих устройств: оперативное запоминающее устройство ОЗУ, постоянное запоминающее устройство ПЗУ или перепрограммируемое запоминающее устройство ППЗУ. Для хранения, чтения и записи команд с высокой скоростью работы процессора используются ОЗУ. Обычно модули серийных БИС ОЗУ имеют сравнительно ограниченную емкость (1 —16 Кбайт) и рассчитаны для хранения исходных и промежуточных данных, а также конечных результатов их обработки. Программы записываются в ПЗУ или ППЗУ. Последние в основном отличаются возможностью обновления (перезаписи) хранимой информации. Подключение ЦП к ПЗУ и ППЗУ осуществляется через адресную шину, шину данных и шину управления. Микропроцессорное управляющее устройство должно быть связано с объектом управления. Эта связь осуществляется через так называемые устройства сопряжения УСО, относящиеся обычно к периферийным устройствам. Так, например, в преобразователях информация о контролируемых параметрах поступает обычно от датчиков тока, напряжения, фазы и др. в форме аналоговых сигналов различных уровней, а с МПК — в Преобразователь
Рис. 5.15. Структурная схема связи преобразователя с микропроцессорным комплектом цифровом виде. Функции УСО заключаются в согласовании этих сигналов. На рис. 5.15 представлена упрощенная структура связи преобразователя с МПК, организующей ввод и вывод информации в процессе управления. Обычно УСО содержат аналого-цифровые преобразователи (АЦП), цифро-аналоговые преобразователи (ЦАП), усилители, коммутаторы и другие устройства и элементы. С другой стороны, возникает необходимость организации взаимодействия периферийных устройств, в частности УСО, с процессором и ОЗУ. Эти функции возлагаются на интерфейс, представляющий собой совокупность унифицированных аппаратурных, программных и конструктивных средств, реализующих взаимодействие УСО с ОЗУ и МП. Эта связь может иметь- радиальную структуру, когда каждое периферийное устройство напрямую подключается к МП и ОЗУ или магистральную структуру при наличии общей связующей шины. Для МПК различных типов выпускаются специальные интерфейсные БИС (как программируемые, так и непрограммируемые), называемые также периферийными адаптерами. Такие интерфейсные адаптеры включают в себя набор регистров, систему шин, дешифратор и другие элементы. Они позволяют кратковременно хранить информацию при обмене ею между ОЗУ, МП и ПЗУ, определять адрес соответствующего регистра, реализуя в общем алгоритм взаимодействия МПК с ПЗУ. Разработка микропроцессорных систем проводится в несколько этапов: формализация задач управления и составление алгоритмов их реализации, составление программы и ее 0 ... 37 38 39 40 41 42 43 ... 49 |
||||||||||||||||||||||||||||||












