Раздел: Документация
0 ... 65 66 67 68 69 70 71 ... 117 Таблица 6.19. Окончание
Схема KILL Схема KILL определяет цифровое ограничение путем проверки наличия слов данных, состоящих из одних "нулей" или одних "единиц" в левом или правом стереоканалах перед цифровой фильтрацией. Выходной сигнал данной схемы переключается в активный "низкий" уровень, когда в течение по крайней мере 250 мс обнаруживается ограничение, осуществляется операция приглушения, или система находится в режиме воспроизведения диска CD-ROM. С помощью регистра С (который и осуществляет указанный ниже выбор режимов) могут быть реализованы два режима индикации ограничения. •Индикация на одном выводе. Активный "низкий" уровень сигнала KILL указывает на то, что ограничение обнаружено сразу в обоих каналах: как в левом, так и в правом. •Индикация на двух выводах. Активный "низкий" уровень сигнала KILL указывает на то, что ограничение обнаружено в левом канале. Активный "низкий" уровень на выводе V3 указывает на то, что ограничение обнаружено на правом канале. Следует отметить, что когда осуществляется процедура приглушения или действует режим воспроизведения диска CD-ROM, указанный вывод (выводы) переключаются в"низкий" уровень. Отключение схем, предназначенных для обработки звукового сигнала Схемы обработки звукового сигнала могут быть отключены (с помощью регистра Е), когда заданы следующие функции: •запрещены операции цифровой фильтрации, пикового детектирования и работает схема KILL (хотя выводы KILL и V3 еще активны); •статус вывода V5 (если он используется для передачи на выход указателя деимфазиса) и выхода по стандарту EBU не установлен. Следует отметить, что выход EBU должен быть установлен в "низкий" уровень раньше, чем будут отключены схемы, предназначенные для обработки звукового сигнала, а после того, как эти схемы будут включены опять, должна быть подана команда, восстанавливающая уровень звукового сигнала по полной шкале. Интерфейс VIA (выводы V1...V5) БИС SAA7370/7370A имеет пять выводов, конфигурация которых может быть при необходимости адаптирована для самых разных случаев (табл. 6.21). Таблица 6.21. Использование выводов V1...V5 в различных ситуациях
Управление двигателем вращения диска Режимы управления двигателем вращения диска Управление скоростью двигателя вращения диска осуществляется интегрированной, полностью цифровой сервосистемой. Информация о текущем адресе внут- реннего FIFO-регистра, рассчитанного на компенсацию отклонения скорости вращения диска от номинальной величиной до ±8 кадров, и информация о скорости вращения диска используются для вычисления характера сигналов, управляющих приводом двигателя. С помощью регистра 6 можно обеспечить несколько различных режимов управления двигателем: •управление плотностью импульсов — здесь требуется двухпроводная линия (сопряженные входные сигналы); частота управляющих импульсов (1 х п) кГц; •управление с помощью широтно-модулированного (PWM) выходного сигнала при двухпроводной подаче мощности; частота модуляции (22,05 х п) кГц; •управление с помощью широтно-модулированного (PWM) выходного сигнала при четырехпроводной подаче мощности; частота модуляции (22,05 х п) кГц; •режим управления CDV. Режим управления плотностью импульсов выходного сигнала В режиме управления плотностью импульсов на выводе MOTOl существуют следующие соотношения между положительной и отрицательной составляющими сигнала (с данного вывода на двигатель поступает модулированный плотностью импульсов сигнал управления). Нейтральному режиму вращения двигателя соответствует коэффициент заполнения 50%. При увеличении коэффициента заполнения наступает режим ускорения двигателя, а при уменьшении — режим его торможения. При подобном способе управления двигателем вращения диска сигнал на выходе МОТ02 представляет собой инверсию сигнала на выходе МОТ01. Оба сигнала изменяют свое состояние только по перепадам внутренней тактовой частоты (1 х п) кГц. Схемы возможного применения вышеописанного метода показаны на рис. 6.56. 22к 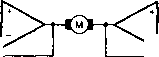 22к МОТ01 МОТ02 0,01мк t U 2t0J 0,01 мк V. SS V, SS V, DO 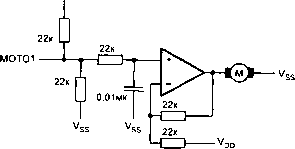 Рис. 6.56. Схемы реализации метода управления двигателем вращения диска с помощью плотности импульсов 0 ... 65 66 67 68 69 70 71 ... 117 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












