Раздел: Документация
0 ... 66 67 68 69 70 71 72 ... 117 Режим управления двигателем с помощью широтно-модулированного (PWM) выходного сигнала (двухпроводной вариант) В режиме управления с помощью широтно-модулированного сигнала разгон двигателя осуществляется широтно-модулированным сигналом PWM, поступающим к нему с выхода МОТ01. Торможение двигателя осуществляется широтно-модулированным сигналом PWM, поступающим к нему с выхода МОТ02. Временные диаграммы, поясняющие этот способ управления, представлены на рис. 6.57. Типичная схема реализации метода представлена на рир. 6.58. мото MOT02 1-Л = 45 мкс п. -1 л. Разгон Торможение Рис. 6.57. Временные диаграммы, поясняющие процесс управления двигателем вращения диска широтно-модулированными сигналами (двухпроводный вариант) + А <м> 10 0.1мк MOT01 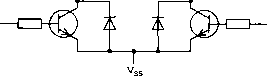 МОТО2 Рис. 6.58. Схемы реализации метода управления двигателем вращения диска с помощью широтно-модулированного сигнала Режим управления двигателем с помощью широтно-модулированного (PWM) выходного сигнала (четырехпроводной вариант) Используя два дополнительных выхода из числа многофункциональных выводов, нагруженных на интерфейс, можно использовать БИС SAA7370/A в качестве мостовой схемы привода двигателя вращения диска с четырьмя точками. Временные диаграммы сигналов при таком варианте управления показаны на рис. 6.59, а типичный пример реализации данного метода — на рис. 6.60. В режиме управления двигателем CDV позиция FIFO-регистра будет определять форму широтно-модулированного сигнала на выводе MOTOI (несущая частота (300 х d) Гц) (символ "d" является показателем кратности увеличения скорости вращения диска). Частота сигнала, формируемого петлей ФАПЧ, будет модулировать плотность импульсов сигнала на выводе МОТ02 (несущая частота 4,23 х п (МГц)). В этом режиме работа интегрированной системы сервоуправления двигателем запрещена. MOT01 ->j 1гер = 45мкс (*-->) л п П. MOT02 V4 V5 Разгон -и U = 240 не Торможение Рис. 6.59. Временные диаграммы, поясняющие процесс управления двигателем вращения диска широтно-модулированными сигналами в четырех проводном (мостовом) варианте V4 MOT01 <м> 10 0,1мк VS MOT02 Рис. 6.60. Схема, реализующая метод управления двигателем вращения диска широтно-модулированными сигналами при мостовой конфигурации Сигнал PWM на выводе MOTOl соответствует общему объему памяти на 20 кадров. Таким образом, номинальная позиция FIFO-регистра (половина полного объема) будет определяться при 60% величины выходного сигнала PWM. В режиме считывания "lock-to disc" (CAV — Constant Angular Velocity — постоянная угловая скорость) режим CDV управления двигателем вращения диска является режимом, который может быть использован только для контроля двигателя. Режимы работы двигателя вращения диска Режимы работы сервосистем, управляющих двигателем вращения диска, контролируются регистром 1 (табл. 6.22). Таблица 6.22. Режимы работы двигателя вращения диска
Таблица 6.22. Окончание
В декодере БИС SAA7370/A для сервосистем управления двигателем вращения диска существует режим "антивозбуждение". Этот режим активизируется с помощью регистра 1. Когда режим "антивозбуждения" активизирован, интегратор будет стремиться удерживать работу сервосистем на линейном участке характеристики регулирования в случае, если двигатель будет пытаться войти в зону насыщения. Предельная мощность В режимах "Старт 1", "Старт 2", "Стоп 1" и "Стоп 2" на двигатель подаются фиксированные значения положительного или отрицательного напряжения. Эти значения могут быть заданы программным путем в виде коэффициента максимально возможного напряжения с помощью регистра 6 для того, чтобы ограничить потребляемый ток во время старта и останова. Возможно установить следующие величины, ограничивающие потребление мощности: 100% (ограничения мощности нет); 75%; 50% или 37% от максимально возможного значения. Характеристики петли регулирования Коэффициент усиления и значения частот излома характеристики регулирования в петле управления двигателем вращения диска могут быть заданы программным путем с помощью регистров 4 и 5. Можно установить следующие значения параметров: •коэффициент усиления — 3,2; 4,0; 6,4; 8,0; 12,8; 16,0; 25,6 и 32,0; •частота излома f4 — (0,5 х п) Гц; (0,7 х п) Гц; (1,4 х п) Гц; (2,8 х п) Гц; •частота излома f3 — (0,85 х п) Гц; (1,71 х п) Гц; (3,42 х п) Гц. 0 ... 66 67 68 69 70 71 72 ... 117 |












