Раздел: Документация
0 ... 47 48 49 50 51 52 53 ... 96 Нахождение решения сводится к поиску в таблице аргументов, в матрице соответствий и в таблице решений. Таблица аргументов имеет две строки, в верхней стоят названия условий, в нижней - значения условий. Рядом со значением условия, находится знак отношения: «=», «9=», «<», «>», «», «». Поиск в таблице аргументов Задача: перейти от кортежа к кортежу При этом проверяется истинность высказывания XjtjXjij для всех ij =\,п и / -\т\ tj - знак отношения. Например, Х\ - вид поверхности Х\ = {0;1}, ц = [=], Х\ = 1 - кодирование по чертежу детали (1 - плоская поверхность, 0 - отверстие). [1=0-ложно 1 Проверяется Х\ =<>, следовательно, , Х2 ~ точ- [1=1- истинно] ность в пределах 0,005 <Х2 < 0,15. Диапазон точности разбивается по интервалам: х2\Х22Х23 -ч-I-1-ь- 0,005 0,05 0,10 0,15 Х2 задан в пределах 0,05 < Х2 < 0,10 => Х2 = х22. Поиск в матрице соответствий сводится к нахождению результирующего столбца /?, содержащего единичные клетки, которые присутствуют одновременно во всех столбцах с номерами \ц , 2г2, ji\, mim, R=R\/\ R2/ 2...aRpj л...лЯтип. Поиск в таблице решений Исходной информацией является столбец R и таблица решений -это столбец решений. Поиск заключается в определении номеров и названий решений. УаТ=У1. Схема поиска: R =Rx2 л Rx22 л Я* 34. X=(xvX2,x3) U х2\ *\2 *21 *23 *3J ХЪ2 *33 *34 У2 У7
2.2.4. Выбор варианта базирования, последовательности обработки поврехностей и построение размерной структуры ТП Вначале дадим некоторые определения. Определения 1.Путь на графе - последовательность ребер или дуг, в которых конец предыдущего совпадает с началом последующего. 2.Замкнутый путь, в котором конец последнего совпадает с началом первого. Называется контур для ориентированного графа или цикл для неориентированного. 3.Граф называется связным, если из любой вершины в любую другую существует путь. 4.Граф, не имеющий контуров или циклов, называется деревом. 5.Если ребро графа имеет направление, то такой граф называется ориентированным или орграфом. 6.Множество деревьев называется лесом. 7.Если в ориентированном дереве имеется вершина, к которой не подходит ни одна стрелка, то такое дерево называется корневым. Каждой обрабатываемой поверхности ставится в соответствие поверхность, называемая технологической базой: noe.jk --->пов.1г. Установление соответствия f будем называть генерацией варианта базирования. Выбор варианта базирования. Чтобы выбрать вариант базирования, надо иметь некоторое множество вариантов, из которого и осуществлять выбор. Выбор производят по некоторому критерию, т.е. каждому варианту ставится в соответствие некоторое число. Это позволяет упорядочить варианты и найти экстремальный. Например, критерием может быть число технологических баз (ТБ). Чем меньше число переустановок, тем вроде бы лучше. Или суммарный объем снимаемого припуска, который тоже желательно иметь меньше. В итоге желательно получить небольшое количество вариантов, которое может просмотреть и выбрать технолог как лицо, принимающее решение. Вначале на примере рассмотрим какие графические структуры возникают при базировании и обработке детали (рис.2.20). 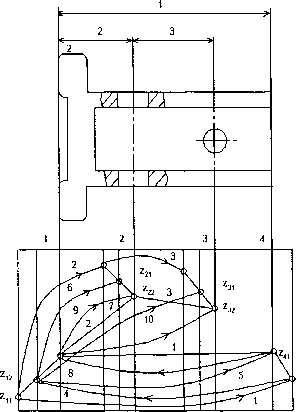 Рис.2.20. Деталь и граф ее механической обработки 0 ... 47 48 49 50 51 52 53 ... 96 |












