Раздел: Документация
0 1 2 3 ... 49 ЧАСТЬ I ЛОГИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ В данной части в качестве вводного материала (глава 1) даются понятие и общая характеристика систем управления электроприводов. Последующее изложение (главы 2-4) относится к системам управления в основном верхнего уровня, построенным на логической основе, традиционной и нетрадиционной, с контактной и бесконтактной элементной базой. Рассматриваются способы описания, анализа и синтеза таких СУЭП, а также примеры их выполнения. Г л а в а 1 ОБЩАЯ ХАРАКТЕРИСТИКА СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ 1.1. Понятие о системах управления электроприводов Объектом изучения в данной книге являются системы управления электроприводов (СУЭП). Что же следует понимать под этим термином? В теории автоматического управления (ТАУ) используется термин «система автоматического управления» (САУ), который объединяет две составные части системы: «управляющее устройство» и «объект управления». Данное понятие абстрагируется от физической природы САУ и представляет собой математическое описание - математическую модель некоторой подразумеваемой физической системы. В прикладных работах по автоматическому управлению вместо термина САУ используется понятие «динамическая система» как некоторая физическая система, объединяющая две части: систему управления - совокупность различных технических средств управления и объект управления - некоторую техническую систему (рис. 1.1). Обе части динамической системы могут иметь внешние воздействия (ВВ) - входные задающие и возмущающие воздействия. Используя данный подход, под термином «система управления электропривода» будем подразумевать комплекс технических средств, формирующих и осуще- ствляющих воздействия на двигатель с целью управления движением рабочего органа (РО) производственной установки в соответствии с технологическими требованиями. Таким образом, в отличие от ТАУ в понятии СУЭП конкретизируется объект управления, которым является двигатель (Д) совместно с механической передачей (МП) и рабочим органом. В составе СУЭП можно выделить слаботочную часть, формирующую алгоритм управления, и сильноточную часть, осуществляющую силовое управляющее воздействие на двигатель. По функциональному назначению управление в электроприводах разделяется на два уровня: верхний - технологический, являющийся внешним уровнем относительно электропривода, и нижний - внутренний относительно электропривода. На верхнем уровне система управления (СУЭП1) вырабатывает технологическое задание на движение рабочих органов отдельной технической установки (например, станка, крана, лифта) или целой технологической системы (например, системы водоснабжения, теплоснабжения, электроснабжения). В задачу СУЭП1 не входит формирование свойств собственно электропривода, его статических, динамических, точностных характеристик. Данная задача возлагается на систему управления нижнего уровня (СУЭП2), которая является неотъемлемой частью понятия «электропривод» (рис. 1.2). Помимо СУЭП2, это понятие включает в себя двигатель (Д), механическую передачу (МП) и рабочий орган (РО). Таким образом, рабочий орган, движущийся совместно с двигателем, но физически принадлежащий производственной установке (рабочей машине), рассматривается как составная часть понятия «электропривод». Это сделано по тем соображениям, что СУЭП2, Д, МП, РО, имеющие друг с другом внешние и внутренние обратные связи, образуют совместно единую динамическую электромеханическую систему. В этой системе входом является задающий сигнал на СУЭП2, выходом - движение РО. Только при совместном рассмотрении составных частей данной системы можно определить все статические и динамические показатели и оценить качество электропривода. В данном определении электропривод является объек- Управляющее воздействие 1
Результат ) X управления ВВ1 lr" III Внешние воздействия 1------**~~ Индивидуальный электропривод ВВ2
С У э п 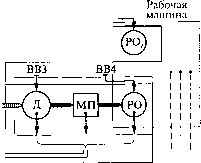 111 Рис. 1.2. Электропривод с системами управления верхнего (СУЭП1) и нижнего (СУЭП2) уровней: шт- - поток механической энергии; пшшп> - поток электрической энергии том как изучения, так и проектирования. В терминологии заводов-изготовителей электропривод как изделие именуется комплектным электроприводом, в состав которого входят СУЭП2 и двигатель, а иногда и редуктор. Если двигатель приводит в движение только один РО, то электропривод называют индивидуальным электроприводом данной установки. Объектом управления для СУЭП1 может быть как один электропривод, так и совокупность всех индивидуальных электроприводов производственной установки. На рис. 1.2 сплошной и штриховой широкими светлыми стрелками изображены сигналы обратных связей по координатам электропривода и установки, а вертикальными тонкими стрелками ВВ1 - ВВ4 обозначены возможные внешние возмущающие воздействия (моменты нагрузки, флуктуации напряжений питания и т.п.). В чем конкретно состоят задачи, возлагаемые на СУЭП1 и СУЭП2, рассмотрим на примере электропривода лифта. Система СУЭП1 выполняет задачу автоматизации работы лифта: вырабатывает команды автоматического выбора направления движения кабины, начала движения, торможения и остановки, определения этажей для остановок. Система СУЭП2 формирует плавные динамические процессы разгона и торможения двигателя, обеспечивает необходимые для точной остановки диапазон регулирования скорости и жесткость механических характеристик двигателя. Различаясь функционально, СУЭП1 и СУЭП2 конструктивно могут быть выполнены из разных блоков, но могут и объединяться в общей панели управления или в едином универ- сальном управляющем устройстве - программируемом контроллере. 1.2. Классификация систем управления электроприводов Для систем управления электроприводов сохраняется известная из ТАУ общая классификация автоматизированных систем по различным признакам. Так, автоматизированные системы подразделяются на два типа: незамкнутые - без учета результата управляющего воздействия на объект управления; замкнутые - с учетом через обратные связи результата воздействия на объект управления. Для замкнутых систем основным принципом управления является принцип обратной связи, означающий управление по отклонению результата от задания. Дополнением к этому принципу является комбинированное управление, когда, кроме отклонения от задания, вводится в управление возмущающее воздействие или дополнительно производные величины задания [3]. К задачам, возлагаемым на системы управления, в общем случае относят: стабилизацию некоторой координаты объекта управления; программное управление по заранее известному закону; слежение за некоторой измеряемой величиной, закон изменения которой заранее неизвестен; самонастройку (адаптацию) системы управления на оптимум какого-либо показателя объекта управления [15]. Дополнительными признаками классификации СУЭП являются: уровень управления: верхний (технологический); нижний (формирующий свойства электропривода); тип алгоритма управления: линейный; нелинейный; аналитический; логический на основе жесткой (классической) логики; логический на основе нежесткой фаззи-логики; способы управления: модальное управление; каскадное (подчиненное) управление; частотное скалярное управление; частотное векторное управление; технологическая координата электропривода: скорость рабочего органа; положение рабочего органа; тип двигателя: двигатель постоянного тока; вентильный; индукторный; вентильно-индукторный; асинхронный; синхронный; элементная база СУЭП: аналоговая; цифровая; релейно-кон-такторная; логическая бесконтактная (логические элементы, контроллеры). 1.3. Показатели качества управления электроприводов Общее назначение СУЭП - сформировать и осуществить совокупность управляющих воздействий на двигатель, обеспечивающих необходимое по технологическим и технико-экономическим требованиям движение рабочего органа производственной установки. При этом качество выполнения возложенных на систему управления задач оценивается различными технико-экономическими показателями качества (ПК). Выделим две группы качеств. К первой группе отнесем качества собственно системы управления (надежность, масса и габариты, стоимость, изменяемость алгоритма управления и т.п.), ко второй - качества, характеризующие результат воздействия системы управления на объект управления, т.е. свойства электропривода в целом (степень автоматизации движения электропривода, жесткость механических характеристик, диапазон регулирования скорости, точность регулирования координат электропривода, их перерегулирование, быстродействие, плавность движения и т.п.). 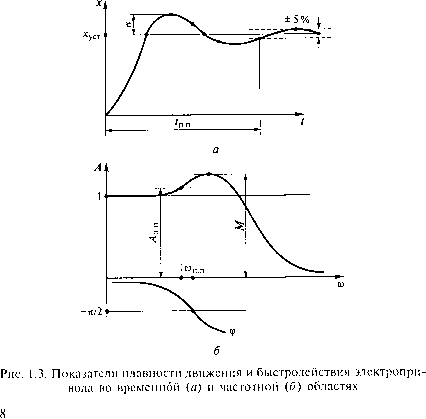 При использовании метода инженерного проектирования СУЭП, когда отыскивается лучший вариант в пространстве нескольких ПК, их количественную оценку выбирают такой, при которой качество тем лучше, чем численно меньше его показатель. Например, надежность оценивается интенсивностью отказов X (чем меньше X, тем лучше СУЭП по надежности). Для определения ряда ПК, характеризующих статические и динамические свойства электропривода, используются тестовые режимы. Так, быстродействие во временной области характеризуется временем переходного процесса, которое определяется как время вхождения в пятипроцентную зону отклонения управляемой координаты х от ее установившегося значения хуст по режиму отработки скачка входного сигнала, т.е. по переходной функции (рис. 1.3, а). В частотной области быстродействие характеризуется полосой пропускания соп п, в пределах которой амплитуда логарифмической частотной характеристики электропривода изменяется не более чем на 6 дБ, а фаза ср уменьшается не более чем на я/2 (рис. 1.3, б). Плавность движения во временной области Таблица 1.1 Качества СУЭП и их показатели
0 1 2 3 ... 49 |












