Раздел: Документация
0 1 2 3 4 5 6 ... 49 КМЗ-2 КМЗ-1 КМ4 КА1 КМ1 R3 R2 R1 КТ1 КА4 КМ2 КО КО КА4 КМ4 КМ4 О- КМ4 „К1 -"-О- Kl КА1 КМЗ-1 КМЗ-1 о- КМЗ-1 К2 К2 КА1 КМЗ-2 КМЗ-2 О- Узел торможения Узел пуска Рис. 2.9. Схема узлов пуска и торможения по принципу тока ной взаимосвязи тока и скорости. Данное условие выполняется при пренебрежительно малых электромагнитных постоянных времени в режимах пуска и торможения. При пуске по принципу скорости с повышенным напряжением в зоне высоких скоростей могут возникнуть броски тока, существенно превышающие допустимые значения. Поэтому данный принцип управления для пуска практически не используется. Важнейшей типовой функцией, возлагаемой на РКСУ, является защита электрической и механической частей электропривода от аварийных режимов. Задача узла защиты - отключить двигатель от источника питания и остановить рабочий орган производственной машины. Аварийными режимами в электрических цепях двигателя могут быть: короткие замыкания, кратковременные и длительные перегрузки по току двигателя, перебои в электроснабжении, недопустимое снижение напряжения сети. Аварийная пауза в электроснабжении может привести после возобновления электроснабжения к самозапуску двигателя и не контролируемому оператором движению рабочего органа. Для исключения самозапуска используется так называемая нулевая защита (нулевая блокировка), осуществляемая с помощью кнопки управления с самовозвратом или командоконтроллера с нулевым замыкающим контактом. При недопустимом уровне снижения напряжения для номинально загруженных асинхронных и синхронных двигателей возникают токовые перегрузки. Кроме того, из-за разных коэффициентов возврата аппаратов управления нарушается правильная работа РКСУ. Защита от недопустимого уровня снижения напряжения выполняется с помощью реле напряжения с высоким коэффициентом возврата. Аварийными режимами для механической части электропривода могут быть: превышение допустимого момента в механической передаче (заклинивание механизма); расцепление рабочего органа (РО) с валом двигателя; превышение допустимой скорости двигателя или РО; выход РО за пределы зоны допустимых перемещений. Наиболее опасным является расцепление РО с валом двигателя в пассажирских подъемно-транспортных установках с активным моментом нагрузки (лифты, канатные дороги, эскалаторы), когда возможен наезд с большой скоростью РО на жесткую преграду. Защита от такого аварийного режима выполняется установкой тормозной системы непосредственно на РО. Перечень типовых аварийных режимов и соответствующих средств защиты от них приведен в табл. 2.1. Кроме перечисленных защит общего назначения, имеются защитные средства, учиты- Таблица 2.1 Аварийные режимы и средства защиты от них
[}fuismo fv\ FA1 FA2 fp srf w ~4-->r-r-0- [] ! SMi! I "IT SM2 I 4-rr o SQF1 - 9 SQF2 "Чс- Рис. 2.10. Схема узла защиты КМ1 О- {У FU2 КМ2 вающие специфику производственных установок и их технологические режимы. К таким средствам относятся, например, различные защитные блокировки в лифтах, защитные устройства от отсутствия подачи смазки и охлаждающей жидкости в металлорежущих станках, от пробуксовки шкивов и барабанов в подъемно-транспортных установках. Пример выполнения типового узла защиты изображен на рис. 2.10. Узел реализует следующие защиты: максимально-токовую (FA1); минимально-токовую (FA2); тепловую (FP); от превышения допустимой скорости (SRF); от недопустимого снижения напряжения и нулевую блокировкуК); от выхода РО из допустимой зоны перемещений (SQF1, SQF2); от коротких замыканий в цепи управления. 2.4. Примеры выполнения РКСУ Проанализируем две РКСУ асинхронным и синхронным двигателями, питаемыми непосредственно от сети. Это наиболее применяемые двигатели при данном способе управления. Двигатели постоянного тока с РКСУ в настоящее время редко используются в промышленных установках, но находят еще достаточно широкое применение в электротранспорте. Асинхронный электропривод с двигателем, имеющим контактные кольца, и РКСУ, принципиальная схема которого приведена на рис. 2.3, может использоваться в различных промышленных установках. Более широко данный электропривод представлен в подъемно-транспортных установках (краны, грузовые подъемники, подвесные канатные дороги, конвейеры и т.п.). Электропривод снабжается механическим тормозом для надежного удержания рабочего органа в неподвижном состоянии при отключенном от сети двигателе. Из рассмотрения силовой части схемы следует, что данный электропривод реверсивный. Ротор вращается «вперед» при прямом чередовании фаз, обеспечиваемом контактором КМ1, и «назад» при обратном чередовании фаз, обеспечиваемом контактором КМ2. Наличие резисторов R1-R3 в роторной цепи позволяет осуществлять реостатные пуск, торможение и регулирование скорости. Цепь постоянного тока, питающая обмотку статора через контактор КМ8, обеспечивает режим динамического торможения. Включенное в роторную цепь реле KV, напряжение которого приблизительно пропорционально скольжению, осуществляет по принципу скорости торможение противовключением в одну ступень. Силовая цепь имеет максимальную защиту, выполненную на реле FA1-FA4. Цепь управления, питаемая от сети постоянного тока, предусматривает ручное управление с помощью командоконтроллера с контактами SM0-SM4. Выделим типовые узлы управления. Узел управления механическим тормозом включает в себя контактор КМ4 и электромагнит YB, который, преодолевая силу тормозной пружины, оттягивает колодки от шкива тормоза при включенном контакторе КМ4. Так как при нулевом положении командоконтроллера контактор КМ4 отключен, то в режиме динамического торможения действует одновременно и механическое торможение. В состоянии покоя электромагнит YB отключен и механический тормоз удерживает ротор двигателя в неподвижном состоянии. Узел защиты, выполненный на реле FV, осуществляет отключение двигателя с наложением механического тормоза при токовых перегрузках, снижении напряжения в цепи управления и исключает самозапуск двигателя. К узлу защиты следует отнести и аварийные путевые выключатели SQ1F, SQ2F, а также плавкие предохранители FU1, FU2, защищающие от коротких замыканий в цепи управления. Узел включения -отключения и выбора направления вращения содержит цепи с контактами SMO, SMI, SM2 командоконтроллера и с контакторами КМ1, КМ2, КМЗ. К узлу пуска, который осуществляется по принципу времени в две ступени, относятся контакты SM3, SM4, реле времени КТ1, КТ2 и контакторы КМ6, КМ7, шунтирующие пусковые резисторы R2 и R3. Данная система управления имеет два узла торможения. К узлу торможения противовключением в одну ступень по принципу скорости относятся реле KV и контактор КМ5, который шунтирует резистор R1 при снижении скорости двигателя до нуля. В состав узла динамического торможения входят контакторы КМ5-КМ8 и реле КТ1 и КТ2. Торможение начинается после установки командоконтроллера в нулевое положение и протекает, как и при пуске, По принципу времени в две ступени. Реле КТЗ, включенное последовательно с контактором КМ1 или КМ2, позволяет прервать динамическое торможение переключением командоконтроллера из нулевого 6...10 кВ 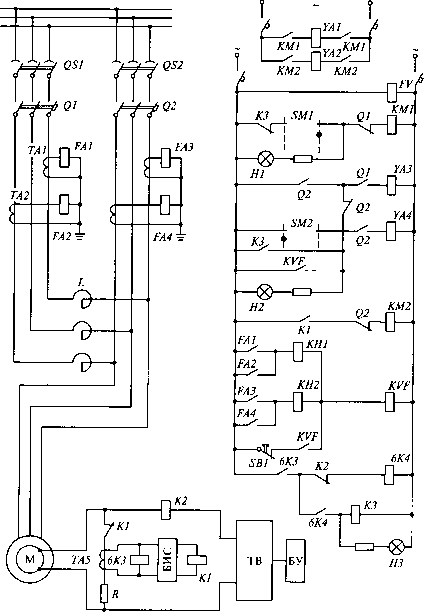 положения в положение «вперед» (SM1) или «назад» (SM2) и осуществить далее пуск в выбранном направлении. На рис. 2.11 приведена несколько упрощенная принципиальная схема электропривода с синхронным высоковольтным двигателем М с тиристорным возбудителем (ТВ) [6]. Данный электропривод характеризуется большой мощностью (сотни или тысячи киловатт) и может находить применение в промышленных компрессорных установках, вентиляционных установках подземных помещений, воздуходувках металлургических печей, в качестве приводного двигателя мощных генераторов и т.п. Существенное достоинство синхронного двигателя перед асинхронным - возможность работы с высоким коэффициентом мощности, включая его единичное, а также опережающее значения. Силовая цепь выполнена с пусковыми реакторами L, что обеспечивает ограничение пускового тока при прямом асинхронном пуске двигателя. Цепь с реакторами, масляным выключателем Q1 и разъединителем QS1 шунтируется при подсинхронной скорости цепью прямого подключения к сети с масляным выключателем Q2. При этом отключается выключатель Q1, а на обмотку возбуждения двигателя подается полное напряжение тиристорного возбудителя. Масляные выключатели Q1 и Q2 включаются автоматически сильными электромагнитами YA1 и YA2, а отключаются слабыми электромагнитами УАЗ и YA4, которые освобождают защелки, удерживающие выключатели Q1 и Q2 во включенном состоянии. Выделим основные узлы в цепи управления. В узел включения-отключения двигателя входят командоконтроллер SMc контактами включения SM1 и отключения SM2, контактор КМ1, электромагниты YA1- YA4, выключатели Ql, Q2 и сигнальные лампы HI, Н2. Сигнал на включение подается переводом командоконтроллера SM в правое положение. При этом контакт SM1 замыкается и включаются аппараты КМ1, YA1 и Q1. После включения выключателя Q1 аппараты КМ1, YA1 отключаются и Q1 удерживается во включенном состоянии защелкой. Сигнал на отключение осуществляется переводом командоконтроллера SM в левое положение. При этом замыкается контакт SM2, что вызывает включение электромагнита УАЗ и отключение выключателя Q1 или включение электромагнита YA4 и отключение выключателя Q2. К узлу асинхронного пуска по принципу скольжения относятся блок измерения скольжения (БИС), реле К1, контактор КМ2, включающий выключатель Q2. При подсинхронной скорости, когда скольжение достаточно мало, включается реле К], которое посредством включения КМ2 включает Q2. Реле К1 воздействует на блок управления (БУ), в результате чего тиристорный возбудитель подает полное напряжение на обмотку ротора, а размыкающий контакт К1 отключает разрядный резистор R от обмотки возбуждения двигателя. 0 1 2 3 4 5 6 ... 49
|
