Раздел: Документация
0 1 2 3 4 ... 49 определяется перерегулированием по переходной функции (см. рис. 1.3, а), а в частотной области - по показателю колебательности М= Атт (см. рис. 1.3, б). Некоторые качества, характеризующие СУЭП, и их показатели приведены в табл. 1.1. Контрольные вопросы 1.Чем различаются термины ТАУ «система управления» и «система автоматического управления»? 2.Какие задачи возлагаются на верхний уровень СУЭП? 3.Назовите задачи нижнего уровня СУЭП. 4.Предложите показатель для качества электропривода «регулируемость по скорости» (вверх или вниз от номинальной). 5.Почему для оценки быстродействия электропривода рекомендуется показатель качества 1/сопп, а не сйпп? 6.Почему для оценки жесткости механической характеристики электропривода рекомендуется показатель качества 5, а не р? Глава 2 РЕЛЕЙНО-КОНТАКТОРНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ 2.1. Понятие о релейно-контакторных системах управления и их функциональном составе Под термином «релейно-контакторные системы управления» (РКСУ) понимаются логические системы управления, построенные на релейно-контакторной элементной базе и осуществляющие автоматизацию работы двигателей. В задачу РКСУ входит автоматизация следующих операций: включение и отключение двигателя; выбор направления и скорости вращения; пуск и торможение двигателя; создание временных пауз в движении; защитное отключение двигателя и остановка механизма. Данные операции требуются для выполнения необходимого по технологическим условиям движения рабочего органа механизма. Непосредственным объектом управления для РКСУ является двигатель, питаемый от сети. Электропривод, выполненный на такой основе, представляет собой простой нерегулируемый электропривод, в основном общепромышленного применения (например, электропривод кранов, тихоходных лифтов, конвейеров, компрессоров, вентиляторов, насосов, некоторых транспортных устройств и т.п.). При этом применяются двигатели асинхронные, синхронные, постоянного тока с последовательным и смешанным возбуждением. Двигатели с независимым возбуждением и другого типа (шаговые, вентильные, вентильно-индукторные) используются практически только в регулируемых электроприводах с питанием от управляемых преобразователей. Некоторые технические характеристики релейно-контакторной аппаратуры: Быстродействие: время срабатывания /ср, с число включений в час N. Масса т, кг.................................... Потребляемая мощность Sn, В-А Срок службы - общее число включений...................................... 0,005...0,1 600... 1200 для контакторов; 1200...3600 для реле; 40000 для герконов 0,03...5 5... 50 для контакторов; 0,2... 5 для реле Электрическая сеть
 Рис. 2.1. Управляющая и исполнительная части РКСУ К достоинствам РКСУ следует отнести: наличие гальванической развязки цепей; значительную коммутационную мощность; высокую помехоустойчивость; возможность использования единого источника питания для силовых и управляющих цепей. Недостатками РКСУ являются: контактная коммутация, требующая соответствующего ухода за аппаратурой и ограничивающая срок ее службы; ограниченное быстродействие; повышенные массогабаритные показатели и энергопотребление. В составе РКСУ можно выделить по функциональному назначению две части: управляющую, формирующую алгоритм управления (реле - Р), и исполнительную, непосредственно осуществляющую управляющие воздействия на двигатель (контакторы - К) (рис. 2.1). Управляющую часть можно подразделить на две составляющие: Р1 - формирующую общие команды на движение механизма (М) согласно технологическому режиму его работы (верхний уровень управления), и Р2 - формирующую необходимое качество движения (нижний уровень управления). Функционально разделенные части Р1 и Р2 конструктивно могут быть как разделены, так и объединены в виде единого управляющего устройства, например, единой панели управления. Через двигатели (Д) РКСУ управляют движением рабочего органа (РО) производственной установки с определенным технологическим назначением. В разных установках РКСУ выполняют различные технологические задачи - перемещение грузов, подачу воды, воздуха, смазки, повороты регулирующих вентилей и задвижек и т.п. Однако для выполнения разных технологических задач требуется набор некоторых одинаковых операций. К ним относятся указанные в начале подразд. 2.1 операции, которые можно назвать типовыми функциями. В выполнении одной такой функции участвует не вся РКСУ, а только ее часть - типовой узел. Таким образом, в составе РКСУ всегда будут присутствовать те или иные типовые узлы. Кроме них для решения конкретной технологической задачи требуются дополнительные, нетиповые, узлы, например, узел, формирующий программу технологического цикла работы установки, узел защиты рабочего органа от пробуксовки приводного шкива, превышения скорости и т.п. 2.2. Электрические схемы и способы анализа РКСУ Последовательность работы узлов в составе РКСУ зависит от их электрических соединений, отражаемых в электрических схемах. Электрическая схема РКСУ является графической формой изображения РКСУ. На рис. 2.2 приведена общая функциональная схема РКСУ. На ней изображен функциональный состав РКСУ в виде узлов и отмечена их взаимосвязь. Наиболее полную информацию о системе управления дает так называемая принципиальная схема. В ней приводятся все элементы системы управления, изображенные и обозначенные в соответствии со стандартом, отображены все электрические соединения элементов. Допускается изображение какого-либо узла без раскрытия его внутреннего содержания, т. е. с показом только его электрических входов и выходов для соединения с другими узлами и источниками питания. При этом указываются наименование типового узла и источник информации о нем. Если узел не стандартный, то его схема должна быть дополнительно приведена как приложение к принципиальной схеме. Пример принципиальной схемы приведен на рис. 2.3. Контакты одного и того же аппарата разнесены в принципиальной схеме по разным цепям, которые этими контактами коммутируются. Схема не дает пространственного расположения аппаратуры, по ней затруднительно выполнить монтаж электрических соединений аппаратов. Поэтому дополнительно к принципиальной схеме в проектной документации дается схема электрических соединений с изображением аппаратов в собранном виде и соединяющих их электропроводов. Фрагмент схемы электрических соединений показан на рис. 2.4. Оценить работоспособность и качество разработанной РКСУ можно на основе ее анализа, т.е. на основе той или иной формы ее описания. Исходным материалом для анализа являются технологическое назначение РКСУ, указанные выше схемы и приложенная к ним спецификация аппаратуры. Анализ может быть общим и детальным. В общем анализе дается характеристика РКСУ в целом: указываются назначение системы, тип элементной базы, выделяются основные узлы и отмечаются и Узел включения-отключения Узел пуска Узел торможения т Узел защиты Узел автоматизации технологического процесса Рис. 2.2. Общая функциональная схема РКСУ 3~ 50 Гц, 380 В + о о роо Ql \ X Л Q2 Q3 V [ 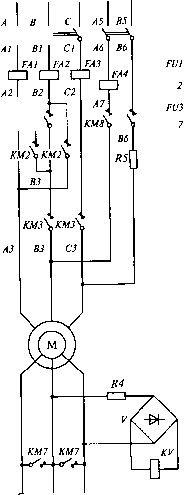 [ R3 R2 R1
I ( *7У КМ6 ю - -{F SM0 321 0 123 I 1 III Ml , 1 и, SQIF KM1 KT3 i i in чггНгти- I I TTT \SM2\\\19 r ttt I III *-чг YKM2 \ KM3 L-QJ 24 JfK 2? 11 ffi 11 KM4 KM3 KM4 4} -о KT4 KM5 TTl ITT ♦ II I IU KM8 -a- KM7 KM1 KM2 KM3 FA4 KT4 КТЗ KM8 FU2 FU4 Рис. 2.3. Принципиальная схема РКСУ асинхронным двигателем с фазным ротором TCI1 ТС/3 SF1 % \ К I Ж 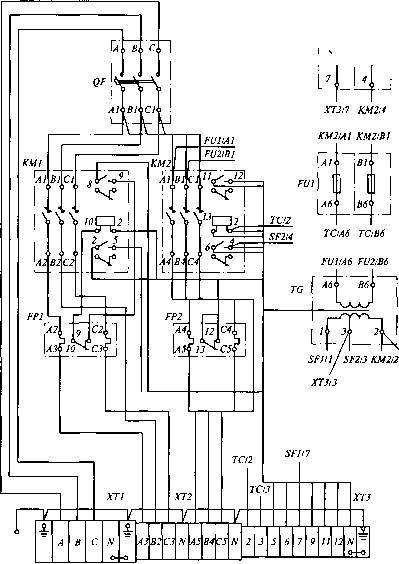 FU2 XT3I2 Рис. 2.4. Схема электрических соединений панели РКСУ принципы, на которых они построены. Способ описания - словесный. В детальном анализе дается подробное описание функционирования всей РКСУ или ее отдельных узлов. По существу в данном анализе описывается алгоритм логической системы управления, построенной на релейно-контакторной элементной базе. 0 1 2 3 4 ... 49 |
|||||||||||||||||||||||||












