Раздел: Документация
0 1 2 3 4 5 6 7 ... 49 В состав узла защиты входят реле максимального тока FA1- FA4, реле минимального тока возбуждения К2, реле разрядного тока 6КЗ совместно с реле нормального времени пуска 6К4, реле KVFvi КЗ, включающие электромагниты УАЗ и YA4. В приведенной РКСУ не показаны цепи защиты от снижения напряжения силовой цепи, исчезновения напряжения в цепи управления (реле FV), замыкания фазы на землю, а также цепи сигнализации. Контрольные вопросы 1.Постройте циклограмму работы узла торможения противовключением двигателя по принципу тока (см. рис. 2.9). 2.Как отразится на пуске двигателя в две ступени по принципу тока (см. рис. 2.9) увеличение тока отпускания токового реле по сравнению с его расчетным значением? 3.Как изменится пусковая характеристика ю = f(M) двигателя с узлом пуска по принципу времени при обрыве цепи катушки ЛТ2(см. рис. 2.7)? 4.Перечислите типовые узлы системы управления асинхронным двигателем, принципиальная схема которой показана на рис. 2.3. 5.К какому узлу системы управления асинхронным двигателем относится электромагнит YB механического тормоза (см. рис. 2.3)? 6.По какому принципу осуществляется пуск синхронного двигателя (см. рис. 2.11) и какие аппараты в его системе управления составляют узел, реализующий этот принцип? 7.Назовите защиты, обеспечиваемые системой управления синхронного двигателя (см. рис. 2.11), и перечислите аппараты, относящиеся к этим защитам. Глава 3 ДИСКРЕТНЫЕ ЛОГИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПРИВОДОВ 3.1. Общая характеристика и метод синтеза ДЛСУ Рассматриваемые в данной главе дискретные логические системы управления (ДЛСУ) имеют дискретную элементную базу, т.е. могут выполняться на контактной и бесконтактной аппаратуре с использованием реле, логических элементов, цифровых узлов, программируемых логических контроллеров. ДЛСУ осуществляют автоматизацию движения рабочих органов установки в технологических режимах. Это означает, что ДЛСУ вырабатывает и подает команды на выполнение в определенной последовательности операций: выбора направления и скорости движения, пуска, торможения, создания паузы, возобновления движения, а также защитного отключения электропривода и остановки рабочих органов в аварийных режимах. Установка может иметь несколько рабочих органов (РО), каждый из которых приводится в движение своим индивидуальным двигателем. Требуемый технологический режим таких установок осуществляется согласованной работой двигателей, которая обеспечивается ДЛСУ. К данным установкам могут быть отнесены: лифт, имеющий в качестве РО кабину, дверь кабины, дверь шахты; станок с инструментальным магазином и с механизмом подачи инструмента; многокоординатный манипулятор и т. п. В технологических режимах перемещения РО конечны в пространстве и цикличны во времени. Во всем разнообразии возможных цикловых перемещений РО можно выделить некоторую типовую диаграмму движения, которая является составной частью практически во всех циклах. Это перемещение РО из одной позиции (А) в другую (Б) с возможным движением к следующей позиции (В) или возвращением в исходную позицию (А) (рис. 3.1). Движение РО чередуется с временными паузами, необходимыми по технологическим условиям работы электропривода. Исходным данным для синтеза ДЛСУ является заданный технологический цикл движения РО, по которому составляется Рис. 3.1. Диаграмма технологического цикла движения РО 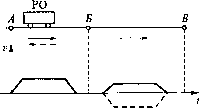 последовательность всех операций, необходимых для выполнения цикла. К таким операциям относятся загрузка РО, пуск двигателя для движения в нужном направлении с необходимой скоростью, торможение и остановка двигателя, создание паузы для разгрузки РО и т.д. Каждой отдельной операции соответствует определенная часть ДЛСУ - узел ДЛСУ. Такими узлами можно воспользоваться как «кирпичиками» для построения всей системы управления. Выполняемый на основе узлов синтез носит название синтез методом типовых узлов. Идея данного синтеза заключена в выполнении двух процедур: декомпозиции - выделении в составе создаваемой ДЛСУ функциональных узлов, соответствующих необходимым технологическим операциям, и композиции - воссоединении узлов в единую систему управления. Данные процедуры выполняются поэтапно: этап 1 - выделение отдельных операций для ДЛСУ и составление последовательности их выполнения; этап 2 - выбор и составление узлов ДЛСУ для выделенных операций; этап 3 - выполнение электрических соединений узлов и составление принципиальной схемы ДЛСУ; этап 4 - проверка составленной схемы ДЛСУ детальным анализом ее работы. Выполнение этапа 1 представляет собой составление алгоритма работы ДЛСУ в той или иной форме. От того, насколько правильно и точно составлены операции, зависит правильность отбора узлов и работоспособность в целом синтезируемой ДЛСУ. Выполнение этапов 1, 2, 3 требует от проектанта определенных творческих усилий, изобретательности и навыков в данной области. Иногда для выполнения синтеза бывает достаточно простого эвристического подхода методом проб и проверок. Однако имеются определенные приемы формализации процедуры синтеза с использованием математического описания ДЛСУ, что облегчает и убыстряет построение ДЛСУ. 3.2. Математическое описание ДЛСУ Общей функциональной моделью ДЛСУ является конечный автомат (КА) - многополюсник с т входами и г выходами (рис. 3.2, а). На входы отдатчиков и командных аппаратов поступают дискретные сигналы - логические двухуровневые переменные х,. На выходах выделяются дискретные управляющие воздействия - логические переменные yt. В преобразовании входных переменных в выходные участвуют в общем случае некоторые внутренние переменные qu q2, qt. Таким образом, переменные у-, являются функциями входных и внутренних переменных КА. а б Рис. 3.2. Конечный автомат (а) и векторное представление его переменных (б) Слово «конечный» в названии КА означает, что числа возможных значений для т входных, / внутренних и г выходных переменных конечны и равны соответственно 2т = М, 2 = L и 2r = R. Конечно и само число возможных функций, выделяющихся на выходах КА. Состояние КА на каждом устойчивом такте характеризуется следующими наборами значений переменных на входе, внутри и на выходе КА: Xj = {xlh x2h xmi\ - /-й набор значений т входных переменных (/-е состояние входов), где /=1,2, М - номер набора; {Хи Х2, Хм} - множество всех состояний входов; Qi = {Qin Ч2ь In} - -й набор значений / внутренних переменных (/-е состояние КА), где / = 1, 2, L - номер набора; {Qi, (?2, •••> Ql\ - множество внутренних состояний КА; Yi = [Уш Уг» Уп\ - -й набор значений г выходов (/-е состояние выходов КА), где /=1,2, R - номер набора; {У,, Y2, YR} - множество состояний выходов. Данные наборы значений переменных могут рассматриваться как векторные переменные на входе и выходе КА (рис. 3.2, б). Временными интервалами КА являются такты. На устойчивом такте состояние КА может сохраняться сколь угодно долго. Переход из одного состояния в другое осуществляется на неустойчивом кратковременном такте (такте включения или отключения аппарата). В зависимости от способа перехода конечный автомат относится к асинхронному или синхронному типу. В асинхронном КА смена тактов вызывается изменением уровня переменной. В синхронном КА смена тактов происходит по той же причине, но только в моменты действия синхронизирующих импульсов, создаваемых генератором неизменной частоты. В зависимости от способа формирования логических функций конечные автоматы подразделяются на однотактные, или комбинационные, и много-тактные, или КА с памятью. В комбинационных КА функции q и у формируются на одном устойчивом такте по значениям входных переменных х на данном такте: q[n] =ф(а-[/;]); у[п] = \\)(q[n], х[п]) =Дх[п]). В многотактном КА функции q и у на такте п формируются в зависимости от значений входных переменных х на данном такте и от значений q на предыдущем такте п - 1: Ч\п] =<р(х[л], фг- 1]), Мл] = У(х[л], 1])» т. е. о и j не являются однозначными функциями х, а зависят от предыдущего состояния КА. Рассмотрим математическое описание КА с памятью как наиболее общего и распространенного применительно к ДЛСУ варианта КА. Функциональное содержание многополюсника (см. рис. 3.2, а) определяется системами / функций переходов q,[n] = q>,(Xi[/i], х2[п], хт[п], Ч\[п- 1], q2[n- 1], ...,?/[«- 1]), где /= 1, 2, /, и г функций выходов У,[п] = 4>i(xdn}, х2[п], *„[«], 9,1/1-1], g2[n-l], <?,[«-1]),(32) где i = 1, 2, л Если перейти от отдельных функций q,[n\, q,[n - 1], j,[«] и входных переменных л,[л] к их наборам значений Q[n], Q[n - 1], К[«], JT[«], то вместо I + г функций с т + I переменными получим две функции от двух переменных: функцию переходов Йя1 = ф№],Йя-1])(3.3) и функцию выходов Y[n\ = 4(X[n],Q[n-\\).(3.4) Функциям (3.3), (3.4) соответствует структурная схема конечного автомата в векторной форме (рис. 3.3). Для логических функций переходов и выходов, как и для любой математической функции, существуют три формы их представления: табличная, графическая и аналитическая. Табличная форма выражений (3.3) и (3.4) имеет вид прямоугольной матрицы со столбцами наборов Х[п] и со строками наборов Q[n - 1] хы КО (ф) ем ЭП Q[n-i] КС2 (чО YM Рис. 3.3. Структурная схема конечного автомата: КС1, КС2 - комбинационные схемы, формирующие функции переходов и выходов; ЭП - элемент памяти; хс - синхронизирующий сигнал 32 (табл. 3.1). В одну клетку столбца Х\п] и строки Q,\n- 1] вписываются два значения наборов Щя] и %[п]. При Мсостояний входов и L разных состояний КА общее число наборов для функции переходов и функции выходов равно произведению LM. Таблица переходов и выходов дает полную информацию о функциях Q[n] и Y[n]. Однако табличное представление недостаточно наглядно, в нем не отражен процесс перехода КА из одного состояния в другое. Более наглядным оказывается графическое изображение функций переходов и выходов в форме графов и циклограмм. Граф можно построить, исходя из таблицы переходов и выходов. Вершинами графов являются L разных состояний КА, которые можно выделить из клеток таблицы. Переход из состояния Q[n- 1] в Q[n] изображается направленной дугой с указанием на ней набора Х[п], соответствующего данному переходу (рис. 3.4). Таблица 3.1 Логические функции переходов и выходов переменных
2 Tepexon 33 0 1 2 3 4 5 6 7 ... 49 |












