Раздел: Документация
0 ... 4 5 6 7 8 9 10 ... 49 Вниз 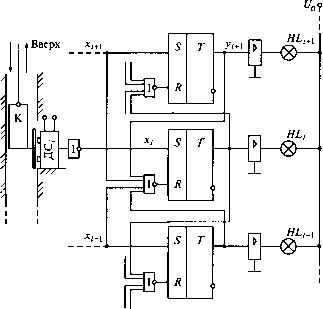 Рис. 3.15. Схема электрического селектора лифта Электрический селектор (рис. 3.15) - это узел в системе управления лифтом, который вырабатывает информацию о местоположении кабины К по сигналам датчиков селекции ДС, находящихся в шахте на уровнях этажей. Индикация об этом дается в виде световых сигналов на табло, где зажигаются сигнальные лампы, соответствующие этажам. Согласно процедуре выполнения синтеза сначала составляем описание работы селектора. При стоянке кабины К на /-м этаже светится лампа HLt /-го этажа. При движении кабины вверх к (/+ 1)-му этажу или вниз к (/- 1)-му этажу лампа HL, продолжает светиться. Когда кабина достигает (/+ 1)-го или (/- 1)-го этажа, лампа HLj гаснет и зажигается сигнальная лампа достигнутого этажа, т.е. HLi+l или #£, [. Сигнальные лампы разных этажей не должны светиться одновременно. Далее для синтезируемого узла выбираем входные и выходные переменные: х,, х2, х„ - сигналы датчиков селекции этажей 1, 2, л со значениями х, = 1, если кабина находится на /-м этаже, и х, = О, если кабина находится вне /-го этажа; У\, Уъ Уп - сигналы ламп этажей 1, 2, п со значениями yt = 1, если лампа НЦ светится, и у, = 0, если лампа HLj не светится. Для выбранных переменных строим исходную циклограмму в соответствии с описанием работы селектора. За цикл работы лиф-
Рис. 3.16. Циклограмма электрического селектора лифта та принимаем движение кабины вверх с первого этажа до последнего с последующим движением вниз до первого этажа. В таком цикле селектора для всех промежуточных этажей имеют место по два периода включения функций yt (рис. 3.16). Для первого и последнего этажей функции у, и у„ имеют по одному периоду включения. Для произвольного промежуточного этажа по приведенной циклограмме составим структурную формулу для yh объединив два периода включения в один общий период включения, как это было сделано в примере 3. Определим для этого периода функции включения и отключения: S} = х, + yf, S"= х, с уi = S,S"= (х, + у;) х, !. Очевидно, что на такте 4 имеет место ложное срабатывание, так как y,X;-i * 0 и у,-* 0 в начале такта 3. Вводим дополнительную переменную q" =х/+ь обнуляющую yt на тактах 3 и 4. Тогда y, = SXq" = (x, + yi)xi lxi+l. Для исключения возможности одновременного свечения ламп на интервале коммутации вводим взаимную блокировку с помощью сигналовyt u yul. В результате получаем У> = (xi + yi)x-,-ixi+lyt iyi+l. Данная формула представляет собой математическое описание Л5-тригера (см. рис. 3.15). Для первого и последнего этажей имеем соответственно: У\ = (*i + УдхгУг, Уп = (хп + Уп)хп-\У„-\- Пример 5. Выполнить синтез ДЛСУ двухпозиционным перемещением рабочего органа (РО) с торможением противовключением асинхронного двигателя по принципу скорости и с временными паузами в крайних позициях зоны перемещения. В позициях А и Б, ограничивающих зону перемещения РО, установлены путевые выключатели SQ1 и SQ2. Для построения исходной циклограммы с режимом автоматического цикла за входные независимые переменные принимаем: х0 - сигнал, разрешающий движение; х, - сигнал нахождения РО в позиции A (SQ1); х2 - сигнал нахождения РО в позиции Б (SQ2); х3 - сигнал наличия скорости двигателя (реле SR). За выходные переменные принимаем: j>, - сигнал на движение вперед от А к Б (контактор КМ1); у2 - сигнал на движение назад от Б к А (контактор КМ2), у4 - сигнал шунтирования тормозного резистора асинхронного двигателя с контактными кольцами. За начало цикла принимаем движение РО с постоянной скоростью от позиции А к позиции Б. Заканчивается цикл началом движения РО вновь от А к Б. В данном цикле выделяем четыре зоны: движение РО от А к Б; нахождение РО в позиции Б; движение РО от Б к А; нахождение РО в позиции А с последующим началом движения к Б. В соответствии с заданным циклом располагаем по строкам исходной циклограммы (рис. 3.17) периоды включения и отключения входных (xq, x,, х2, х3) и выходных (уи уъ у4) переменных. На циклограмме для у{ и у2 отображаются такты торможения противовключением (ТП) (Б1, А1), паузы (Б2, А2) и выхода из зоны позиций Б и А (БЗ, A3). Так как ТП осуществляется с использованием тормозного резистора, то для переменной у4 периоды включения должны начинаться перед пуском двигателя после паузы, а заканчиваться при входе в зоны позиций А и Б. Составленная таким образом циклограмма нереализуема, так как на тактах Б2- БЗ и А2-АЗ нарушается принцип однозначности для функций у4, у2, у,. Для устранения неоднозначности вводим дополнительные переменные ql2 и q,u которые создают на тактах Б2-БЗ и А2-A3 разные состояния конечного автомата. Данные переменные выполняют функции задержки времени и пуска после пауз tE и tA в позициях Б и А. После добавления переменных д,2 и qn циклограмма становится реализуемой и может быть описана структурными формулами.
Рис. 3.17. Циклограмма электропривода для двухпозиционного перемещения РО Составляем формулы с использованием функций включения и отключения. Для переменных q,2 и qn Sqi = X}, Sq2 = х2; q,2 = x3x2[+tBK!l]; Sqi = xi, Sq\ = xx; qn = х3х,[+/вкл]. Для переменной y2 объединяем оба периода включения в один общий период с функциями включения и отключения Sy2 = (х2 + + у2), Sy2 =х[. Для исключения ложного срабатывания на такте Б2 вводим дополнительную переменную qy2 = х3 + q,2. Тогда У 2 = (x2+y2)xlyl(x3+ql2). Аналогично для переменной у, получаем формулу У\ = (*i +У\)х2У2(хг +qn). Для исключения одновременного включенного состояния переменных у, и у2 на тактах коммутации в формулы введены инверсные величины у, и у2, выполняющие взаимную обратную блокировку. Для переменной у4, которая имеет в цикле также два периода включения, составляем функции включения, отключения и структурные формулы для каждого периода в отдельности. Для второго периода включения после паузы tE 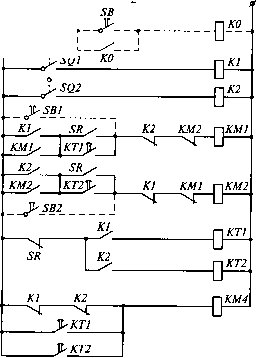 Рис. 3.18. Схема РКСУ двухпози-ционным перемещением РО для первого периода включения после паузы tA °>>4,1 q,x + ххх2 - Sy\y, У ал = Чл + ххх2. Для всего цикла у4 = уАХ + уА2 = qtX + qt2 + ххх2. По полученному аналитическому алгоритму, состоящему из пяти формул соответственно для q,x, qtl, ух, у2, у4, составляем схему реализации системы управления, т. е. выполняем структурный синтез. Схема варианта системы управления на релейно-кон-такторной аппаратуре приведена на рис. 3.18. Сигналы х0, qtX, q,2 создаются соответственно ключом S реле времени КТ1 и КТ2. Реле К1 и К2 размножают контакты путевых выключателей SQ1 и SQ2. Построенная система управления выполняет только автоматический цикл, который может начинаться из позиции А или Б. При обнулении сигнала х0 при движении РО между А и Б двигатель отключается от сети и тормозится выбегом за счет момента нагрузки. Чтобы иметь возможность из этого положения пустить двигатель в том или ином направлении, можно ввести в схему кнопки SB1 и SB2 с замыкающими контактами, шунтирующими контакты Kl, SR в цепи КМ1 и К2, SR в цепи КМ2. Вместо ключа S, разрешающего работу электропривода, можно использовать реле КО, управляемое кнопками SB0 и SB. 3.5. Построение ДЛСУ на основе цифровых узлов 3.5.1. Логические системы управления на основе программируемой логической матрицы Построение ДЛСУ относится ко второй части синтеза - структурному синтезу на основе цифровой элементной базы для сложных технологических циклов движения электроприводов. Система управления на релейных или простых логических элементах (ЛЭ) оказывается нецелесообразной из-за требуемого большого числа этих элементов, что усложняет их монтаж, ухудшает массогаба-ритные и надежностные показатели. Переход к микросхемам средней интеграции, т.е. к комплексным ЛЭ, объединяющим в одном корпусе целый логический узел, сокращает число элементов и повышает надежность системы управления. Проанализируем построение логических систем управления (ЛСУ) с использованием некоторых типовых цифровых узлов. В качестве первого из них рассмотрим программируемую логическую матрицу. Как устройство управления программируемая логическая матрица (ПЛМ) состоит из нескольких блоков (рис. 3.19). Основу данного устройства составляет собственно ПЛМ -микросхема PLM, выполняющая операции И, ИЛИ, НЕ, с помощью которых можно реализовать любую логическую функцию. Связь логических переменных ПЛМ с физическими входными воздействиями, поступающими на объект управления - электропривод, осуществляют узлы ввода (УВ1) и вывода (УВ2). Функция памяти реализуется с помощью обратных связей, а функцию задержки времени выполняет отдельный узел УВЗ. Структурная схема ПЛМ представляет собой блочный вариант выполнения конечного автомата. В составе ПЛМ две логические матрицы - МЛ1, реализующая функцию И, и МЛ2, реализующая функцию ИЛИ. Выходная переменная Zj на j-м выходе МЛ1 определяется конъюнкцией вход- ? УВ1 I -х МЛ1 (И) УВЗ МЛ2 (ИЛИ) УВ2 7 Рис. 3.19. Общая схема ПЛМ -*k s/(ко) о 0 ... 4 5 6 7 8 9 10 ... 49 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












