Раздел: Документация
0 ... 5 6 7 8 9 10 11 ... 49 ных переменных х, тех входов /= 1, 2, т, для которых есть электрическая связь су-м выходом, т.е. Zj = xlx2 ... • хт,(3.15) где т s п, а п - общее число входов МЛ1; j = 1, 2, /, а / - общее число выходов МЛ1. Выходная переменная у, на /-м выходе МЛ2 определяется дизъюнкцией переменных тех входов j= 1, 2, к, для которых есть электрическая связь с /-м выходом, т.е. у,- = zi +z2 +... + Zk,(3.16) где к е /, / = 1, 2, г, а л - общее число выходов МЛ2. Электрические соединения в МЛ1 и МЛ2 могут выполняться различными способами в зависимости от технологии исполнения ПЛМ. Для каждой входной и выходной переменных логических матриц имеются соответствующие взаимно перпендикулярные шины, которые соединяются между собой диодами или триодами. Рассмотрим вариант диодного соединения шин. Для матрицы МЛ 1 выходная диодная шина выполняет функцию И (рис. 3.20, а). Из приведенной схемы следует, что на данной шине единичный логический сигнал, равный напряжению U„u появляется только тогда, когда на всех катодах соединительных диодов также име- 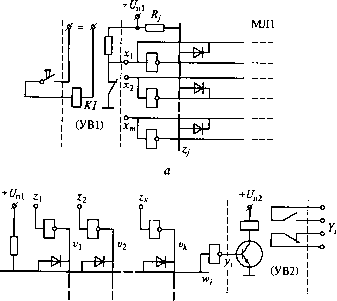 б Рис. 3.20. Диодные шины И (а) и ИЛИ (б) ются единичные сигналы. При появлении логического нуля хотя бы на одном из катодов сигнал на выходной шине обнуляется. Падение напряжения на резисторе Rj практически равно Unl. Таким образом, у-я выходная шина матрицы МЛ1 выполняет логическую функцию И: zj = xix2 • ... • хт. Аналогично функционирует диодная выходная шина ИЛИ матрицы МЛ2 (рис. 3.20, б). Относительно внутренних переменных у,-и w, согласно схеме шина выполняет функцию И: w,, = vxv2 ... vk. Так как vxv2 ... • vk = zxz2 ... -zk = Z\ + z2 + + zk = Щ, то у,- = щ = = Zi + z2 + •• + Zk, т.е. с учетом инверсных элементов на входах и на выходе диодная шина выполняет логическую функцию ИЛИ. Рассмотрим пример построения узла ДЛСУ на основе ПЛМ. Пусть задана реализуемая циклограмма узла, полученная синтезом в примере 1 (см. рис. 3.11).Циклограмме соответствуют структурные формулы, в которых переменные состояния qx и q2 примем за выходные переменные: У\ =Я\ = (x + qi)(x + q2); y2=q2= (x + q2)(x + qx). Приведем данные формулы к виду ДНФ: У1=Я\= Ч\Х + xq2 + qxq2 = z, + Z2 + Z35 y2=q2= q2x + xqx + q{q2 = z4 + Z5 + Z6. <?i 17 4* 4* Zl □ □□□□□ к-эе- Ч у\ = ч\ уг=яг Рис. 3.21. Схема соединения шин ПЛМ для заданного алгоритма управления Для реализации функций у{ и у2 на ПЛМ потребуется шесть входных и шесть выходных шин матрицы МЛ1 и две выходные шины матрицы МЛ2 (рис. 3.21). Электрические соединения указанных шин изображены крестиками. Достоинство построения ЛСУ на основе ПЛМ - высокое быстродействие за счет параллельного принципа работы и простота реализации ЛСУ. К недостаткам следует отнести элементную избыточность по числу шин и исходных электрических соединений, а также необходимость в замене ПЛМ при изменении алгоритма управления. 3.5.2. Логические системы управления на основе аппаратного контроллера Такие микросхемы как мультиплексор MS и демультиплексор или дешифратор DC в сочетании со счетчиком СТ позволяют построить достаточно простой аппаратный контроллер (АК) для автоматизации работы электроприводов в технологических циклах (рис. 3.22). Идея построения АК состоит в том, чтобы непосредственно по исходной циклограмме без перехода к структурным формулам реализовать необходимый алгоритм управления. В подразд. 3.3 было показано, что для реализуемости циклограммы достаточно создать на всех ее устойчивых тактах разные состояния. Данную задачу в АК выполняет счетчик, который переключается передним фронтом выходного импульса мультиплексора на каждом устойчивом такте цикла. При этом на выходе счетчика формируется вектор состояния АК Q[n], который подается на вход дешифратора и на адресный вход мультиплексора. В каждом такте на соответствующем выходе DC появляется единичное значение переменной qt. При смене такта логическая единица переходит от выхода к выходу qi+l. Требуемый на каждом такте согласно Т>о D m-X Ax A2 MS D С •+1 R CT Qo Qx Qi-x
4r-X исходной циклограмме набор выходных переменных создается аппаратным способом - соответствующими набору диодными соединениями выходов DC. Входные независимые переменные х{, х2, хм от датчиков и командных ключей поступают на MS с m адресными и М информационными входами М=2т. Если переход к следующему такту должен осуществляться обнулением сигнала х„ то на данный вход MS вводится инвертор. В конце цикла счетчик должен обнуляться, устанавливая исходное состояние системы управления. Если емкость счетчика NCT = 2" больше требуемого числа переключений в цикле /Уц, то в начале цикла можно предварительно записать в СТ число ND = NCT- Nu. Без предварительной записи ND можно заставить СТобнулиться, подав на свободные входы MS единичный сигнал. Числа разрядов MS", СТ, DC согласуются между собой: nMS = пСТ = nDC. При изменении задачи управления изменяются электрические соединения входов и выходов АК, т. е. программирование АК осуществляется аппаратным путем, что отражено в названии данного контроллера. Рассмотрим пример реализации циклограммы на основе АК. Используем исходную циклограмму примера 5 подразд. 3.4, дополненную сигналами переключений счетчика (рис. 3.23). Пусть исходное положение рабочего органа - позиция А при отключенном сигнале Xq, разрешающем движение. Начало цикла - х0 = 1, конец цикла - х0 = 0. Расставим на циклограмме моменты переключения выходных переменных VI, V2, V8. Переменные Такты
*0 *2 *3 Ух Уг Ул *2 уз У5 Уб Рис. 3.23. Исходная циклограмма для реализации ЛСУ на основе аппаратного контроллера 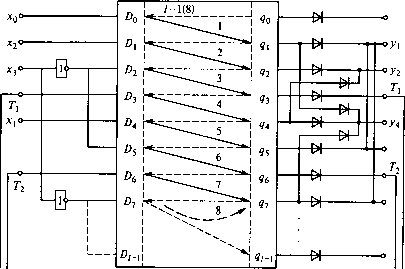 1- т 2 -1 1-[ П J- Рис. 3.24. Схема соединений входов и выходов аппаратного контроллера, реализующего заданный алгоритм управления Для анализа работы АК представим его упрощенно в виде многополюсника с числом входов Dj и выходов д„ равным числу переключений в цикле (рис. 3.24). Входные переменные располагаются в порядке очередности переключений в цикле: х0, х2, х3, Ть х,, х3, Т2. Выходные переменные включаются и отключаются поочередно. Чтобы сохранить на последующем такте единицу на выходе, включенном на предыдущем такте, требуется подать на него через диод единичный сигнал с включаемого выхода. При необходимости одновременного включения на одном такте нескольких выходов требуется соединить их через диоды. Стрелками с номерами переключений на рис. 3.24 показан перевод выходного сигнала в единичное состояние нарастающим фронтом соответствующего входного сигнала. Движение РО начинается после появления х0 = 1. На выходе д, появляется единичный сигнал ух = \. Через диодную связь приобретает единичное значение у4. Переключение V2 обнуляет переменные ух и у4 и включает у2. Происходит торможение противовключением. Переключение V3 отключает у2 и включает таймер Г,, который после отсчета времени паузы tE сигналом на входе Г, включает вновь уА и через диодную связь - у2. Осуществляется пуск и движение РО от позиции Б к позиции А. Далее переключе- ния V5, V6, V7 обеспечивают режим движения и паузы в позиции Б, аналогичный режиму в позиции А. Переключение V8 возвращает АК в исходное состояние при х0 = 0, когда РО находится без движения в позиции А. 3.5.3. Логические системы управления на основе программируемого логического контроллера Рассмотренный аппаратный способ реализации ЛСУ на основе простых и быстродействующих управляющих средств типа ПЛМ и АК оказывается достаточно эффективным для выполнения электроприводом жестко регламентированных технологических циклов. В данных циклах задача управления неизменна. Примером могут служить технологические линии массового изготовления одних и тех же деталей или сборки одних и тех же изделий. Однако в гибких производствах мелкосерийной продукции технологические циклы могут изменяться, следовательно, должны изменяться алгоритмы управления движением рабочих органов производственной установки. Для этого требуется частичная замена аппаратуры и ее электрических соединений. Более эффективным средством в данном случае является программный способ выполнения алгоритма управления на базе универсального управляющего устройства. В программном способе логические функции, составляющие алгоритм управления, формируются последовательным применением операций И, ИЛИ, НЕ. В принципе для этого требуется всего один логический элемент (ЛЭ) И с двумя входами, один ЛЭ ИЛИ с двумя входами, два ЛЭ НЕ, а также некоторые дополнительные элементы, обеспечивающие процесс последовательного формирования логических функций. Меньшее число ЛЭ, что имеет место при сложных алгоритмах управления, и возможность изменять алгоритм управления - достоинства программного способа по сравнению с аппаратным. Из-за последовательного принципа формирования алгоритма программный способ уступает по быстродействию аппаратному, использующему параллельный принцип. Однако развитие современной элементной базы, выполняющей последовательные операции, ведет к резкому повышению быстродействия. Выполним синтез простого программируемого логического контроллера (ПЛК) на основе рассмотренного в подразд. 3.1 метода типовых узлов. Имеется в виду выполнение структурного синтеза, когда алгоритм управления в виде структурных формул предварительно получен на основе абстрактного синтеза конечного автомата. Исходными данными для построения ПЛК являются: число входных переменных х,- - ш; 0 ... 5 6 7 8 9 10 11 ... 49 |
|||||||||||||||||||||||||||||||||












