Раздел: Документация
0 ... 7 8 9 10 11 12 13 ... 49 Таблица 3.5
команде А ->Т и А = 1 таймер прерывает работу счетчика ключом К1 (сигнал VT = 0, см. рис. 3.26) на время паузы, после которой ключ К1 замыкается (Ут - 1) и счетчик команд продолжает работу. УУ ГТИ КС .& &
~°С1 -о*0
Рис. 3.29. Схема узла управления (о) и циклограмма работы входящего в его состав генератора синхронизирующих сигналов (б) 64
C3o-1 аб Рис. 3.30. Схемы узлов входа (а) и выхода (б) Построенный ПЛК содержит всего 22 микросхемы (три мультиплексора, четыре демультиплексора, три регистра, два счетчика, одно ПЗУ, восемь логических элементов типа И, НЕ, ИЛИ и один триггер) и один генератор тактовых импульсов. Последовательный принцип работы ПЛК обусловливает следующее требование к его быстродействию: период цикла программы Тп, состоящей из п команд с периодом Тк выполнения каждой команды, должен быть меньше минимального по времени такта xmin в технологической циклограмме объекта управления, т.е. Тп-Ткп<тmin. Приближенное условие рентабельности ПЛК по сравнению с аппаратным способом управления: Тп < 5 мс при 1000 команд в программе. Синтезированный ПЛК является вариантом программной реализации конечного автомата. Он прост по выполнению и по программированию на основе структурных формул алгебры логики и может решать несложные задачи автоматизации работы электроприводов в технологических циклах. Выполненный синтез ПЛК преследует в основном учебную цель - показать возможность построения методом циклограмм и типовых узлов ЛСУ не только с аппаратным, но и с программным способом управления. Рассмотрим пример составления программы для ПЛК, реализующего заданный алгоритм ЛСУ. Пусть требуется реализовать на основе ПЛК алгоритм управления асинхронным двигателем с прямыми пуском и торможением противовключением, который осуществляет двухпозиционное перемещение рабочего органа с временной паузой в одной из двух позиций. Используем алгоритм управления, который был получен в примере 5 подразд. 3.4, исключив из него формирование паузы в позиции А. Тогда, оставляя паузу в позиции Б и используя реле скорости (переменная х3), получим скорректированный алгоритм со следующими структурными формулами: У\ = (*i +У\)х2У2ха; у2 =(х2 +у2)х,у,х0(х3 +qt); 3 Терехов 65 qt - х2х3[+/вкл], где, как и в примере 5, х0 - сигнал разрешения на движение; х,, х2 - сигналы нахождения рабочего органа соответственно в позициях А и Б; уи у2 - сигналы движения рабочего органа соответственно от А к Б и от Б к А. Таблица 3.6 Программа ПЛК
Программа ПЛК представляет собой описание последовательности необходимых действий по формированию заданных структурных формул. Эти действия определяются командами, которыми располагает ПЛК (см. табл. 3.4 и 3.5). С какой формулы начать программирование, не имеет принципиального значения. В сложных программах это может сказаться только на количестве требуемых команд. Начнем с формулы для переменной q,. На формирования q, требуются три команды: подать х3 на один из входов элемента И; выполнить конъюнкцию х2х3; поместить результат в ЗУ. Далее можно перейти к формированию у,, затем паузы t и у2. Выполненная таким образом программа с использованием табл. 3.4 и 3.5 представлена результирующей таблицей (табл. 3.6). Для реализации заданного алгоритма достаточно иметь двухразрядные по входам УВ1, ЗУ и УВ2. Для более сложных алгоритмов требуются УВ1, ЗУ и УВ2 с большим числом разрядов, что дает возможность расширить список команд адресов в табл. 3.6. Контрольные вопросы 1.Каковы этапы синтеза ЛСУ методом типовых узлов? 2.Сформулируйте общее условие реализуемости циклограммы ЛСУ. 3.Какие из нижеприведенных циклограмм узлов ЛСУ являются нереализуемыми? Определите дополнительные переменные, чтобы получить реализуемые циклограммы. 123 Х\ хг Х\ х2 Х\ У У X} 4. Для приведенных ниже циклограммы ЛСУ и структурных формул укажите необходимые соединения шин ПЛМ, составьте схемы входов и выходов АК, составьте программу для ПЛК. хг q = (x2 + q)xu y=(x2 + q)x[. 5.Определите количество входов, выходов и ячеек памяти в ПЛК, а также входов и выходов в АК, необходимых для выполнения асинхронным двигателем с короткозамкнутым ротором двухпозиционного перемещения рабочего органа с динамическим торможением по принципу скорости и временными паузами в крайних позициях. 6.Сравните АК и ПЛК по их исполнению, быстродействию и способу программирования алгоритмов управления. Глава 4 ЛОГИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ НА ОСНОВЕ ФАЗЗИ-ЛОГИКИ 4.1. Общие положения и принципы фаззи-логики В предыдущих разделах рассматривались вопросы анализа и синтеза дискретных логических систем управления (ДЛСУ), построенных на двухуровневых дискретных элементах релейного типа. Данные ДЛСУ успешно решают задачи автоматизации работы электроприводов в технологических циклах и относятся к верхнему уровню управления. Методической основой построения ДЛСУ является классическая логика с булевой алгеброй. ДЛСУ в состоянии решать и некоторые задачи нижнего уровня управления, выполняя функцию регулятора с несложным нелинейным алгоритмом релейного действия. Рассмотрим пример такого регулятора для электропривода, осуществляющего режим позиционирования, т.е. перемещения рабочего органа в некоторую позицию, в которой должно быть достигнуто положение равновесия. Для данного режима можно составить следующий алгоритм управления [3]: если знак отклонения Дх = х-хуст рабочего органа от установившегося положения равновесия Хует и знак производной отклонения Дх совпадают, то рабочий орган удаляется от положения равновесия и требуется большое управляющее воздействие Uy с противоположным знаком. Если же знаки Дх и Дх различны и значение скорости достаточно, то управляющее воздействие Uy может быть равно нулю. Данный алгоритм можно представить тремя математическими условиями: ЕСЛИ Дх> я И Дх=х> -b, ТО Uy= -1; ЕСЛИ Дх< а И Дх < b, ТО Uy= 1; ИНАЧЕ Uy= 0. Единичные значения Uy следует понимать как максимальные логические уровни с разными знаками, соответствующие необходимому значению физического управляющего воздействия. Если принять за объект управления шарик, перемещающийся по некоторой поверхности, а за управляющее воздействие Uy силу, прикладываемую к шарику (рис. 4.1, а), то сформулированные условия представляют собой необходимые условия устойчивости объекта управления в положении равновесия. В совокупности данные условия будут и достаточными, но при наличии силы трения. Для более общего случая объекта управления, например, слож- ной электромеханической системы, совокупность сформулированных условий сохраняется как приближенное условие устойчивости, которое может быть экспериментально или расчетно скорректировано в отношении параметров a, b, Uy. Для значений нелинейной функции управления Uy в плоскости Дх, Дх выделены три области (рис. 4.1, б). Если в начальный момент времени объект управления (шарик) находится на расстоянии от положения равновесия Дхнач < -а и имеет скорость Дхнач > Ь, то согласно алгоритму управления Uy = 0 и движение шарика будет продолжаться до положения Ах = а с неизменной скоростью Дх = Дхнач при отсутствии трения или с уменьшающейся скоростью при его наличии. В момент Ах = а управляющее воздействие Uy = -\, начинается торможение, а затем движение в обратном направлении. Шарик будет совершать затухающие колебания вокруг положения равновесия, пока не остановится где-то внутри интервала [-а, а]. Реализация алгоритма управления схематично представлена на рис. 4.1, в. Непрерывные входные воздействия регулятора преобразуются компараторами в двухуровневые логические переменные с/,, U2 и Vx, V2, а выходные логические переменные U и V 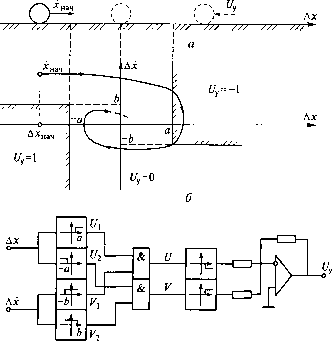 Рис. 4.1. Объект управления (а), фазовый портрет его движения {б) и схема реализации логического алгоритма управления (в) 0 ... 7 8 9 10 11 12 13 ... 49 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












