Раздел: Документация
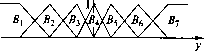
0 ... 9 10 11 12 13 14 15 ... 49 Блок дефаззификации (Dff) преобразует термы В} в управляющий сигнал у = л. Если фаззи-устройство (ФУ) должно вырабатывать несколько управляющих воздействий, то такое многоканальное ФУ можно рассматривать как несколько параллельно работающих ФУ. Рассмотрим вопрос формирования алгоритма фаззи-управле-ния в приведенной на рис. 4.4 структуре фаззи-управления [17]. Основу алгоритма составляет свод правил, который находится в блоке базы знаний. Для п входных переменных, каждая из которых имеет т термов, максимальное число правил т". Правила составляются экспертом на основании его понимания задачи управления. Если речь идет о регулируемой динамической системе со сложным или неполным математическим описанием, то за основу алгоритма управления может быть принято приведенное в подразд. 4.1 условие устойчивости релейно-управляемой системы, но в расширенной логической форме. 1.Чем больше Дх, т.е. модуль отклонения Дх координаты х от желаемого уровня равновесия хжел, тем больше должно быть противодействующее этому отклонению управляющее воздействие. 2.Чем больше тенденция к увеличению Дх, тем больше должно быть противодействующее этой тенденции управляющее воздействие. 3.При большом Дх] и большой тенденции к уменьшению Дх требуется нулевое или небольшое управляющее воздействие, уменьшающее Дх. Если объект управления имеет полное математическое описание, то за основу может быть принят найденный линейный алгоритм, решающий заданную задачу управления линеаризованным объектом. Соответствующие найденному алгоритму правила проверяются (экспериментально или расчетно) и при необходимости корректируются. Правила составляются с учетом следующих рекомендаций: свод правил должен быть достаточно полным для выполнения поставленной задачи управления, не должно быть неучтенных возможных ситуаций с измеряемыми координатами, уводящих процесс из-под контроля; желательно, чтобы каждое правило было простым, содержало одно условие и одно заключение; для получения более качественного процесса управления не должно оставаться не перекрытых хотя бы двумя правилами фаззи-множеств; чем разнообразнее тестовые сигналы в процессе составления алгоритма, тем менее чувствительную к появлению в условиях эксплуатации непредусмотренных возмущающих воздействий систему можно получить. Дополнительно к своду правил в состав алгоритма входят функции принадлежности, определяющие количественную взаимосвязь физических переменных с лингвистическими, т.е. с термами. К форме ФП д(х) предъявляются минимальные требования в силу приближенного принципа управления на основе фаззи-логики. Важно, чтобы функция д(х) плавно нарастала от нуля при х = а до максимального значения, равного 1 при х = с, и плавно снижалась до нуля при х= Ъ (см. рис. 4.2). Для простоты математического описания ФП представляются обычно в треугольной или трапецеидальной форме. Важными количественными показателями являются значения левой (а) и правой (Ь) границ, а также центра (с) ФП. Число ФП, приходящихся на каждую физическую переменную, выбирают из соображений качества управления. С увеличением числа ФП качество управления повышается, однако при этом усложняется алгоритм и повышаются требования к его быстродействию. Имеющийся опыт построения систем с фаз-зи-управлением показал, что трех-пяти ФП для каждой входной переменной и пяти-семи ФП для выходной переменной оказывается достаточно для приемлемого качества решения задач управления в электротехнике. Реализация алгоритма управления в регулируемых электротехнических системах возлагается на фаззи-регулятор (ФР). Процедура построения алгоритма ФР, выполняемого поэтапно, представлена в виде структурной схемы на рис. 4.5. Для простого, но достаточно распространенного варианта фаззи-управления с двумя входными (х, и х2) и одной выходной (у) переменными свод правил может быть представлен компактно в виде таблицы правил (рис. 4.6). Каждая из двух входных переменных имеет пять термов (NB, NS, Z, PS, РВ), а выходная переменная, являющаяся управляющим воздействием, - семь термов (NB, NM, NS, Z, PS, РМ, РВ). Рассмотрим процесс преобразования значений входных переменных х, = с,, и х2 = 2 в управляющее воздействие у = г\ в системе фаззи-управления (см. рис. 4.4), для которой имеются таблица правил и функции принадлежности (см. рис. 4.6). Процедуру формирования управляющего воздействия, выполняемую в три этапа, поясним на примере действия двух правил (рис. 4.7). 1.ЕСЛИ е Ап И t\2 е А22, ТО лб е В6 = РМ. 2.ЕСЛИ 5, е Ап И l\2 е А22, ТО ц7 е В = РВ. На этапе фаззификации входные физические переменные преобразуются в соответствующие термы. Для распространенного на практике варианта ФП треугольной формы, когда левое (а) и правое (bj) граничные значения ФП совпадают соответственно с центром с, , предыдущего ФП и с центром с,+1 последующего ФП, т.е. когда а{ = с, ,; £, = с,+1; с, = а,- , = bi+], математическое описание ФП имеет следующий вид:
3 Установка алгоритма на фаззи-регулятор Рис. 4.5. Структурная схема построения алгоритма фаззи-регулятора Uvi(x) = 1, если х < с{, ц/((х) = (х - с, ,)/(с, - Ci i), если с,- , < х < с-, i = 2, т, где т - число термов переменной х; ц.„<х) = (х - с,+,)/(с,- с,+1), если с,-,, < х < ci+l; i = 1, (т - 1); цт(х) = 1, если х > с„. Здесь индекс / обозначает левую сторону, а индекс г - правую сторону ФП. Для рассматриваемого примера значения х, = и х2 = Ъ,2, измеренные в некоторый момент времени, определяют два значения ФП термов Ап, А22 для правила 1 - д12 = 0,7, ц22 = 0,4 и два значения ФП термов Ап, А22пля правила 2 - \хп = 0,3, ц22 = 0,4. На этапе логического заключения выходным термам переменной у присваиваются значения ФП входных переменных с общим условием < ц(х) и конкретно для правил с оператором И согласно принципу минимума: ИО0 = Цб = min(n,2, Ц22) = Ц22 = 0,4 для В6 по правилу 1; иСу) = Ц7 = гшп(цп, \л22) = Un = 0,3 для В7 по правилу 2.  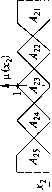
 NB NM NS Z PS РМ РВ Рис. 4.6. Табличное представление алгоритма фаззи-регулятора с двумя входными и одной выходной переменными В результате выходные термы В6 = РМ и В7 = РВ оказываются усеченными минимальными значениями входных функций принадлежности. Полученные по двум активизированным правилам термы В6 и у57 объединяются по принципу максимума (оператор 1. ЕСЛИ %1еА12 ж- 2. ЕСЛИ еЛи И А22,ТОЦ6£В6 И22 ix22=/\min(\il2, ц22) \2х2 -► ЛбУ И А22,ТОц7еВу М22Hll=amin(>1ll122) Щв7 klХ247 У jmax цеВ Рис. 4.7. Реализация двух правил по принципу минимума-максимума ИЛИ) в один общий терм В = В6 v В7. В общем случае два значения и £,2 могут активизировать четыре правила, которые объединят четыре выходных терма. Таким образом, на этапе логического заключения происходит преобразование входных термов в выходные с передачей от входа к выходу значений функций принадлежности по принципу минимума -максимума, получившему название min - max-регулятор Мамдани (по имени его автора). В данном логическом заключении заложен некоторый компромисс при принятии решения: минимизация входных фаззи-множеств компенсируется определенным образом максимизацией выходного фаззи-множества. Полученный результирующий терм В определяет множество возможных значений управляющего воздействия у. Вопрос, как выбрать одно конкретное значение г] для физической выходной переменной, решается на третьем этапе преобразования. На этапе дефаззификации логическая переменная должна быть преобразована в определенное значение физической переменной - управляющего воздействия. Пусть активизировано только одно правило, например, правило 1. Одному значению д6 = 0,4 усеченного терма В6 соответствует все множество значений у от начала терма до его конца по оси абсцисс. При этом все значения у средней части терма, где д6 = const = 0,4, равноценны по принадлежности к терму В6, но различны по величине - в левой части они меньше, а в правой больше. Для интегральной оценки одним числом всего множества возможных значений у в фаззи-логике за это число принимают (эвристически) абсциссу центра тяжести площади усеченной части терма. Для одного правила это оказывается значение, соответствующее центру терма. Так, для правила 1 у = ц6. Практически всегда оказываются активизированными несколько правил, для которых имеет место объединенный терм В, усеченный разными уровнями функций принадлежности. Методом центра тяжести усеченной площади находится интегральное значение г управляющего воздействия (см. рис. 4.7): Зкон У кон J n(y)dy Унач Данный метод для расчета значения у оказывается сложным, требует много места в памяти управляющего устройства, снижая его быстродействие. Поэтому на практике, вводя некоторые упрощения в данный метод, используют его достаточно несложную модификацию в виде так называемой синглетон-функции Ей,- где р., - значение ФП, присвоенное /-му выходному терму; с, - центр /-го выходного терма. Выделим особенности фаззи-управления, в основу которого положена фаззи-логика. Лингвистические переменные - термы - количественно оцениваются не отдельными числовыми значениями, а числовыми множествами, перекрывающими друг друга. В этом смысле фаз-зи-управление следует отнести к категории управления «в большом». Фаззи-управление, в принципе, не требует знания точной модели объекта, оно организует приближенную стратегию управления, моделируя способ мышления человека. Фаззи-управление позволяет выразить в простых лингвистических терминах любой необходимый для задачи управления алгоритм, линейный или нелинейный, который должен быть предварительно составлен экспертом. Фаззи-контроллер, реализующий управление, - это включенная в процесс управления и работающая в реальном времени экспертная система, которая применяет фаззи-логику для преобразования качественных логических переменных - термов. Отмеченные особенности позволяют очертить круг задач управления, которые могут эффективно решаться на основе фаззи-логики для многих электротехнических систем. В общем случае можно сказать: фаззи-управление предпочтительней тогда, когда необходимый алгоритм управления проще сформулировать лингвистическим путем, а в тех областях, где возможны и фаззи-, и традиционное управление, предпочтение отдается тому способу, который дает лучший результат по требуемому показателю. Фаззи-управление не подходит для построения высокоточных систем регулирования, однако может успешно использоваться для указанных систем как дополнительное регулирующее средство в режимах отработки больших воздействий, когда проявляются нелинейности объекта управления и основной регулятор не обеспечивает удовлетворительное качество данных режимов. Фаззи-управление способно придавать нелинейным системам свойство робастности (см. подразд. 5.1.2). Оно целесообразно как средство приближенной параметрической адаптации в установках с изменяющимися параметрами, где точные традиционные системы параметрической адаптации сложнее структурно и труднее реализуемы по условиям устойчивости. 0 ... 9 10 11 12 13 14 15 ... 49 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












