Раздел: Документация
0 ... 10 11 12 13 14 15 16 ... 49 Весьма перспективно применение фаззи-управления в ряде сложных и трудно описываемых математически технологических процессах. Для таких объектов данное управление, с учетом дополнительных факторов, влияющих на процесс, позволяет его улучшить по различным показателям. Фаззи-логика, моделируя процесс мышления человека, может заменять его в управлении самоходными транспортными средствами (автомашинист, авто водитель). 4.3. Примеры фаззи-управления в электроприводах В регулируемых технических объектах требуемый алгоритм управления является определенным законом регулирования. Данный закон формируется программным или аппаратным способом фаз-зи-регулятором (ФР), представляющим собой объединение на некоторой элементной базе трех блоков фаззи-управления - Ff Inf, Dff(pwc. 4.8, а). Простейший, но достаточно распространенный ФР имеет два входа и один выход со сводом правил, представленным в виде одной таблицы. В более общем случае (с п входов и т выходов) ФР оказывается многоканальным по числу выходов и функционально представляет собой т фаззи-регуляторов с т сводами правил и с общими п входами. Объединенные конструктивно данные ФР образуют управляющее устройство - фаззи-контроллер. О- ФР
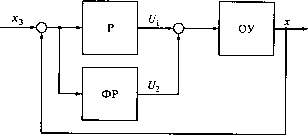 Рис. 4.8. Варианты фаззи-управления с прямым (а) и дополнительным (б) фаззи-регулятором Применительно к электроприводам можно выделить два уровня для фаззи-управления: верхний, при котором осуществляется управление технологическим процессом через электроприводы ЭП,, ЭП„, являющиеся в данном случае непосредственными электромеханическими регуляторами этого процесса (рис. 4.9); нижний, при котором улучшаются показатели качества собственно электропривода. При этом ФР может быть как основным, так и дополнительным средством управления (рис. 4.8, б). В первом варианте объектами воздействия фаззи-регулятора верхнего уровня могут быть простейшие нерегулируемые электроприводы, осуществляющие «мягкое», приближенное позиционирование рабочих органов по выходным командам (например, «приоткрыть немного вентиль», «открыть полностью», «прикрыть наполовину» и т.п.). Для управления технологическим процессом могут использоваться и регулируемые электроприводы, обеспечивающие требуемое изменение скорости рабочего органа по команде ФР (например, «уменьшить немного подачу насоса», «увеличить максимально» и т.п.). При этом системы регулирования каждого в отдельности электропривода могут выполняться и традиционными средствами, а фаззи-контроллер обеспечивает их взаимосвязанную работу в технологическом процессе. Рассмотрим в качестве примера дополнительного средства управления фаззи-регулятор в системе управления электроприводами для автономной системы теплоснабжения. Данный ФР, дополнительный к традиционному регулятору, формирует задающие воздействия для электроприводов, регулирующих тепловой процесс, в качестве которых могут использоваться электроприводы циркуляционного насоса, задвижки трубопровода, вентиля горелки. Наиболее экономичным оказывается режим регулирования теплоснабжения путем изменения подачи насоса с дополнительным регулированием подачи топлива. Однако для этого требуется регулируемый электропривод насоса. Для автономной системы теплоснабжения может решаться задача поддержания на минимально возможном уровне расхода теп- Технологический процесс Рис. 4.9. Многоканальный фаззи-регулятор электроприводов в системе управления технологическим процессом ФР
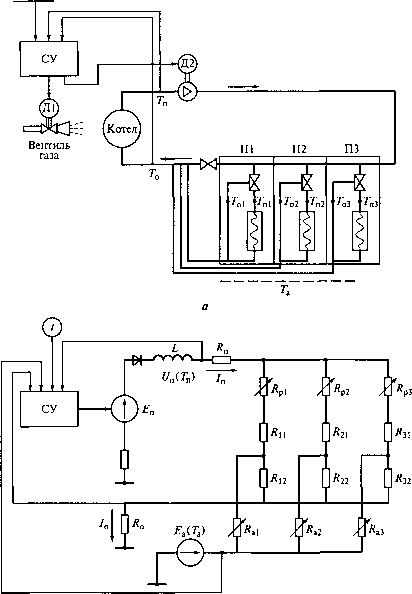 б Рис. 4.10. Функциональная схема (а) и электрическая схема замещения (б) отопительной системы с электромеханическим фаззи-управлением температурным режимом помещений ловой энергии при сохранении комфортности температурного режима отапливаемых помещений П1, П2, ПЗ (рис. 4.10, а). Потребность здания в теплоте существенно изменяется во времени даже при неизменной температуре наружного воздуха. Причины этого - изменяющиеся температурные режимы отдельных помещений из-за проветривания, открытие или закрытие вентиля отопительной батареи, изменения коэффициентов теплоотдачи стен от действия ветра, дождя, солнца. Следовательно, регулирование входной температуры подачи теплоты только в зависимости от наружной температуры не обеспечит оптимального теплоснабжения. С помощью фаззи-управления можно сформировать задание на подачу теплоты с учетом перечисленных факторов. Это позволит создавать для потребителя такой уровень теплоты, который соответствует, хотя и приближенно, фактической потребности в теплоте в данный интервал времени. Влияние перечисленных факторов отражается, прежде всего, на обратной температуре системы теплоснабжения, т.е. на температуре обратных потоков воды, поступающих в котельную. Поэтому целесообразно формировать задание как на подаваемую входную температуру Тп, так и на обратную температуру Та. На рис. 4.11, а приведена схема задающего устройства в системе регулирования подачи тепла с адаптивным двухканальным фаз-зи-регулятором [26]. Данный ФР формирует исходные задания на г-т 1 я  -24 С NB NM NS Z ОС
Рис. 4.11. Система задания температурного режима (а) и таблица правил для фаззи-регулятора (б) входную (подающую) Тзи и обратную Т30 температуры. Результирующая задающая температура Тзр формируется с учетом коррекций по отклонению АТ0 = Тза - Т0 и дополнительному заданию Тзпи, сформированному по тепловым режимам помещений. Кроме датчиков температур в системе и температуры атмосферного воздуха Та используется датчик времени t (часы). Этот датчик позволяет изменять подачу теплоты в течение суток, например, уменьшать подачу ночью или в праздничные дни при отсутствии персонала в рабочих помещениях. В качестве исполнительных регулирующих органов в системе теплоснабжения используются электроприводы Д1 и Д2 соответственно топливного вентиля и насоса, подающего нагретую воду (см. рис.4.10, а). На рис. 4.11, б представлен для одного канала ФР алгоритм, формирующий задание Тзп с термами PS, РМ, РВ, PVB (положительная очень большая) в зависимости от наружной температуры Та с термами Z, NS, NM, NB и от времени суток t с термами Nig, Мог, Day, Ev (ночь, утро, день, вечер). Для проверки эффективности составленного алгоритма регулирования теплового потока требуется математическое описание системы теплоснабжения как динамической системы. Данная система характеризуется распределенными и изменяющимися параметрами, большим временным запаздыванием, и получить достаточно полное адекватное математическое описание - крайне сложная задача. Даже приближенная расчетная модель, в которой объединяются электрические цепи и функциональные блоки, оказывается сложной и трудно математически описываемой [26]. Для качественной оценки процесса регулирования можно в первом приближении принять расчетную модель в форме только электрических цепей (рис. 4.10, б). В данной схеме напряжения Uи ЭДС Е моделируют температуру, ток I - тепловой поток, индуктивность L - запаздывание в передачи теплового потока. Резисторы Rn, Rn, R2\, R22, Rn, Rn имитируют отопительные батареи помещений Ш, П2, ПЗ. Значения сопротивлений, определяемые коэффициентами теплоотдачи батарей, обусловливают падения напряжения, соответствующие перепаду температуры воды от входа в батареи до выхода из них. Регулируемые реостаты Rpl, Rp2, Rp3 имитируют вентили, позволяющие вручную индивидуально регулировать тепловой поток в батареях. Сопротивления настраиваемых резисторов RaU Ri2, yj?a3 определяются коэффициентами теплоотдачи наружных стен помещений, которые могут меняться при изменении состояния наружного воздуха (влажности, ветра, тени, солнечного освещения). Сопротивления резисторов Ru и R0 определяют падение температуры соответственно на подающем и на обратном трубопроводах. В качестве примера фаззи-управления нижнего уровня рассмотрим процедуру синтеза ФР позиционного электропривода, под- вижная часть которого представляет собой двухмассовую систему маятникового типа с гибкой подвеской рабочего органа с грузом. Практически это может быть электропривод тележки некоторой крановой установки (рис. 4.12). Задача управления состоит в осуществлении электроприводом позиционирования, т.е. перемещения рабочего органа (груза массой т2) в определенную позицию с устранением раскачивания груза в ней. Оператор (крановщик) на основании приобретенного опыта работы выполняет данную задачу соответствующими переключениями командоконтроллера, изменяющими величину и знак управляющего воздействия - приводного момента двигателя Мп, создающего силу воздействия на тележку Fn = М„/р, где р - радиус приведения передачи. Фаззи-регулятор должен заменить оператора, что бывает необходимо в тех условиях производства, в которых человек не может присутствовать. При этом система управления должна быть дополнена датчиком угла (ДУ) отклонения маятниковой подвески от вертикали. Что взять за основу для алгоритма ФР? Для построения традиционного регулятора потребовалось бы получить математическое описание объекта управления и затем известными из теории автоматического управления методами синтеза для линейных систем определить алгоритм регулятора. Данный объект управления является сложной нелинейной электромеханической системой, математическое описание которой можно получить, применяя урав-  Рис. 4.12. Подъемно-транспортный механизм с маятниковой подвеской рабочего органа с грузом 0 ... 10 11 12 13 14 15 16 ... 49 |
||||||||||||||||||||||||||||||||||||||||||||||||||












