Раздел: Документация
0 ... 6 7 8 9 10 11 12 ... 49 число переменных состояния q, - I; число выходных переменных у, - г; язык алгоритмов управления - структурные формулы алгебры логики. Значения параметров т, I, г определяются алгоритмами управления, которые предполагается реализовать на ПЛК. Чем сложнее алгоритм, чем больше для него требуется входных сигналов от датчиков и выходных управляющих сигналов, тем больше значения т, I, г. В составе ПЛК можно выделить следующие блоки (рис. 3.25): устройства ввода (УВ1) и вывода (УВ2) соответственно для входных и выходных логических переменных; логическое устройство (ЛУ), выполняющее операции И, ИЛИ, ПОВТОР; запоминающее устройство (ЗУ) для запоминания промежуточных переменных q, в процессе формирования выходных функций; устройство задержки времени - таймер (Т) для создания пауз в циклах; программное запоминающее устройство (ПЗУ) для хранения команд, формирующих алгоритм управления; управляющее устройство (УУ), осуществляющее согласованную последовательность работы всех составных частей ПЛК. В свою очередь, каждое выделенное устройство ПЛК можно рассматривать как укрупненный функциональный узел одного или нескольких более простых типовых узлов. Задача синтеза ПЛМ - на основании операций, выполняемых частями ПЛМ, определить и выбрать типовые узлы - известные микросхемы и составить 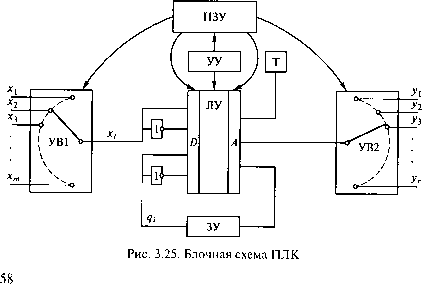 Таблица 3.3 Операции ПЛК и узлы, их выполняющие
схему их соединений. В табл. 3.3 представлены операции, возлагаемые на ПЛМ, и соответствующие им узлы. Для всех узлов, кроме таймера и узла управления, указаны типы микросхем, на которых они могут быть выполнены. Рассмотрим взаимодействие узлов ПЛК, осуществляемое с помощью узла управления. В ПЗУ в форме команд записаны операции, которые должны выполняться соответствующими узлами для формирования алгоритма управления. В трех логических операциях (ПОВТОР, И, ИЛИ) может участвовать любая переменная из четырех - х, х, q, q (операции 2 и 3 в табл. 3.3). Следовательно, потребуется 3x4 = 12 команд. Чтобы направить результат операций на один из трех узлов - УВ2, ЗУ, Т (операции 5 и 6 в табл. 3.3), необходимы три команды. Для завершения цикла последовательного формирования выходных переменных ПЛК потребуется еще одна команда. Таким образом, синтезируемый ПЛК должен иметь 12 + 3 + 1 = = 16 команд операций (КО). Команды поступают на адресные входы: a,, а2 узла ПП, а3, а4 узла ПО, а5, а6 узла ПВ. Следовательно, одна команда операций займет шесть разрядов: КО, = {а,,- а2, а3, а4, а5, а6,}. Команды операций охватывают внутренние узлы ПП, ПО, ЛО, ПВ, входящие в состав логического устройства (ЛУ) (см. рис. 3.25). На остающиеся узлы - УВ 1 с т входными переменными х„ УВ2 с г выходными переменными у,, ЗУ с / запоминаемыми переменными а, - должны подаваться команды адресов (КА), определяющие переменные х„ yh а,. Для определения данных адресов потребуется m + r+ I команд. Примем для простоты, что т = г= 1=А. Тогда потребуется всего 12 команд. Данные команды поступают на входы: а7, а8 узла УВ1, а9, а,0 узла УВ2, ап, а12 узла ЗУ. Следовательно, одна команда адреса займет шесть разрядов: КА/= {а7/ а8, а9, а10,- а„,- а12,}. Таким образом, для результирующей команды контроллера КК, ПЛК потребуется 12 разрядов: КК, = {КО,КА,} = {а1,а2,,..а12,}. Для выполнения каждой команды, находящейся в ПЗУ, узел управления должен осуществить три разделенных по времени действия: определить в ПЗУ очередную команду по сигналу С,; вывести команду из ПЗУ и подать на соответствующий узел по сигналу С2; выполнить команду по сигналу С3. Для осуществления данных действий в составе УУ должны быть генератор синхронизирующих сигналов с,, с2, с3 (ГСС) и счетчик команд (СК), определяющий номер очередной команды в ПЗУ. Выделенные в составе ПЛК все узлы электрически соединяются между собой информационными входами и выходами соответствующих микросхем. По этим связям проходят сигналы от входа до выхода, формируя выходные переменные yt - управляющие сигналы ПЛК. На основании составленной табл. 3.3 и с учетом приведенных пояснений по функциональному назначению и действию узлов ПЗУ и УУ можно детализировать исходную блочную схему ПЛК, изобразив все ее составляющие узлы и их соединения (рис. 3.26). Электронные ключи Kl, К2, КЗ выполняют функции: обнуления СК в конце каждого программного цикла (К1); прерывания работы СК на время паузы в технологическом цикле (К2); блокирования элемента ИЛИ в узле ЛО при выполнении операций ПОВТОР, И (КЗ). 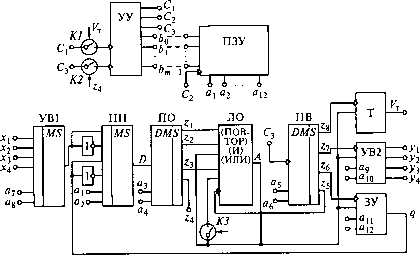 Рис. 3.26. Функциональная схема ПЛК Выходная переменная узла ПП определяется по структурной формуле мультиплексора (MS): D = аха2х + аха2х + axa2q + axa2q. Выходные переменные узлов ПО и ПВ определяются по формулам демультиплексора (DMS): zx = a3a4D; z2 = a3a4D; г3 = ща4Б; z4 = aa4D; z5 = a5a6C3; z6 = a5a6C3; Zi = a5a6C3; z% = a5a6C5. На вход узла ПВ подается не информационный сигнал А, а синхронизирующий сигнал С3, который появляется на одном из выходов ПВ и вводит значение А в один из узлов ЗУ, УВ2, Т. Такая схема позволяет сохранить помещенное значение А в указанных узлах в течение интервала времени до нового обращения к выбранному узлу. В качестве типовых узлов в составе ПЛК используются отдельные микросхемы или их объединения. Схема узла ЛО в составе ЛУ содержит элементы И, ИЛИ и D-триггер (рис. 3.27). Для узла ПЗУ может быть использовано перепрограммируемое постоянное запоминающее устройство (PROM), которое состоит из микросхемы, объединяющей дешифратор (DC) с перепрограммируемой триодной матрицей, и выходного регистра (рис. 3.28). Набор значений т входных переменных DC активизирует одну из 2" горизонтальных шин ПЗУ. На выходных вертикальных шинах ПЗУ выделяются нули на тех разрядах, которые электрически соединены с активизированной горизонтальной шиной. На выходе Z2o- г3о-
Рис. 3.27. Схема узла ЛО регистра выделяется команда КК,, Все команды операций и адресов представлены в виде двух таблиц (табл. 3.4 и 3.5). Символом х в них отмечены значения (могут быть 0 или 1), которые не влияют на данные команды. Наборы переменных Д на входе ПЗУ, определяющие очередной номер команды, поступают от счетчика команд, входящего в состав узла управления (УУ) (рис. 3.29, а). Генератор синхронизирующих сигналов (ГСС) в УУ можно составить из двух микросхем - генератора тактовых импульсов (ГТИ) и кольцевого счетчика (КС). Циклограмма работы ГСС показана на рис. 3.29, б. Узлы входа и выхода УВ1, УВ2 выполнены на типовых микросхемах (рис. 3.30). Для УВ1 (мультиплексор MS 4x1) выходная переменная х,- определяется по формуле: х = о7а8х, + a7asx2 + а-,агхъ + а7а&х4. DC ! -Ж- -ж- I I I -Ж-- PROM -ж- -Ж-1-г itf КК, кк3 КК, с2°- -ж- КК м -г-Ж-
Рис. 3.28. Схема узла ПЗУ Таблица 3.4 Коды и команды логических операций
Для УВ2 (DMS 1x4, RG) выходные переменные ц DMS определяются по формулам: Z9 = a9ai0A; г10 = а9а]0А; zu = a9al0A; zn = а9а10А, а выходные переменные yt RG - по формуле yi[n] = CiA + Ciy,[n-\], где / = 1, 4. Узел ЗУ (DMS + RG + MS) отличается от УВ только добавлением мультиплексора для выходной переменной q. Устройство задержи времени - таймер (Т) в зависимости от требуемой временной паузы в технологическом цикле может быть выполнен на различной элементной базе. Но при любом исполнении Т принцип его взаимодействия с ПЛК один и тот же: при 0 ... 6 7 8 9 10 11 12 ... 49 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












