Раздел: Документация
0 ... 41 42 43 44 45 46 47 ... 82 Если rBX>Ru то соотношение (6-4) упрощается: W(P): К Как видим, реальный интегратор ведет себя как инерционное звено первого порядка, имеющее коэффициент усиления К и эквивалентную постоянную времени тэ= (К+ 1) C\Ri. Если на входе такого звена напряжение в момент времени г = 0 скачком изменится от нуля до UBX, то напряжение на его выходе будет изменяться следующим образом: вь,х (0 = - UBXK (1 - + UBbIX 0ё (6-6) где UBUX0 — начальное напряжение (при г = 0) на выходе пре- 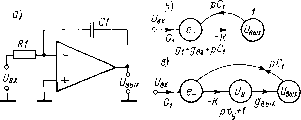 Рис. 6-5. Схема простейшего интегратора (а) и соответствующие ей графы (б и в) образователя. Таким образом, на выходе реального интегратора при скачке напряжения на входе мы получим не линейно изменяющееся напряжение, как это было бы в случае идеального интегратора, а экспоненциальное, характерное для обычной интегрирующей RC-цепи, постоянная времени которой равна тэ и на вход которой подано напряжение —UBXK. Однако, если коэффициент усиления ОУ достаточно велик, то уровень —KUBX, к которому стремится эта экспонента, будет по модулю тоже достаточно большим (при с/вх=1В и /(=104 этот уровень равен 104 В). При этом начальный участок этой экспоненты, ограниченный линейным участком амплитудной характеристики ОУ (10—12 В), мало отличается от прямой линии, описываемой выражением —UBxtl(RiCi). Входной ток L. и э. д. с. смещения есм приводят к появлению дополнительных погрешностей интегратора; их влияние сказывается в добавлении напряжения (eCM + i-Ri) к потенциалу И-входа усилителя. Передаточная функция для этого напряжения определяется формулой КрЯА (/( + !) + ! В связи с этим при учете погрешностей от t и есм в правую часть равенства (6-6) следует добавить выражение Ориентируясь на то, чтопогрешность, вносимую током г , можно скорректировать, устанавливая между Н-входом ОУ и землей (рис. 6-5, а) резистор, имеющий сопротивление Ri. Если на вход интегратора подается синусоидальное переменное напряжение с частотой f, то очевидно, что малые погрешности интегрирования будут обеспечиваться только тогда, когда fl/тэ- С другой стороны, при слишком высокой частоте входного сигнала начинает сказываться, во-первых, инерционность самого ОУ и, во-вторых, снижение его коэффициента усиления за счет того, что реактивное сопротивление конденсатора обратной связи становится малым и шунтирует выход ОУ. Граф, учитывающий влияние этих факторов, показан на рис. 6-5, в. На этом графе ОУ представлен в виде инерционного звена, имеющего передаточную функцию —/С/(рту+1) и выходное сопротивление Гвых= 1/ёГвых. На основании графа рис. 6-5, в находим (С, + cCj) (Pty + 1) (,Vix + РСг) + KgBuxpC1 - р2С2 (рту + 1) Р2Твыхту ~Ь Ртвых — К 1ВЫХ ) + Р (КЪ + тх +н-1 (6-7) где ti = RiCu Хвых = гВыхС1. Учитывая, что /С>1, Ti>TBbix и КХ[$>ху, преобразуем (6-7) следующим образом: W(p) Р2ТВЫХ Ту + Р1ВЫХ I 1 + —— ) — К + TR p«T1Ty + p(KTl + 1y/K)+ 1 К . ТвыхpXylK . Твых + Ту рКч + 1та рХу/К +1Кхг pXylK + 1 (6-8) Сравнивая (6-5) и (6-8), видим, что учет ту и гвых ОУ привел к появлению двух дополнительных членов в передаточной функции интегратора. Один из этих дополнительных членов соответствует неидеальному дифференцирующему звену с коэффициентом передачи Твых/ti и постоянной времени хУ1К, а другой — инерционному звену с такой же постоянной времени и с коэффициентом передачи (тВых + ту)/(/Ст1). Соответственно при нулевых начальных условиях и скачке напряжения на входе (при г = 0) напряжение на выходе инте- гратора будет описываться выражением KUBX (1 е-т9) + ивхе V+ Ч Кч и. 1 -е У* Диаграмма изменения напряжения на выходе интегратора для ■лото случая показана сплошной линией на рис. 6-6. Штриховая линия на этом же рисунке соответствует реакции идеального интегратора. Как видим, отличие реакций идеального и реального интеграторов особенно велико в первый момент времени, при t< 3xyIK. По истечении же нескольких постоянных времени ху/К напряжение на выходе реального интегратора изменяется по такому же за.кону, как и на выходе идеального интегратора, но с отставанием по времени. Поскольку скорость изменения USbIX составляет KUBXlx3 = UBx/r, а сдвиг выходного сигнала, определяемый третьим членом правой части (6-8), равен с/Вх(твых+ту)/(/Ст1), то это отставание определяете; (Твых + 1у)/КЧтвь>х + ту отношением —---—-. ЧК Для коррекции такого запаздывания можно включить после пювательно с конденсатором 01 дополнительный резистор [38], сопротивление которого определяется равенством 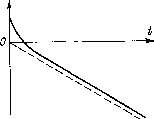 Рис. 6-6 Реакция простейшего интегратора на скачок входного сигнала >1Х Ч~ ту КЧ к Однако в большинстве практических случаев эту задержку не корректируют, ею пренебрегают ввиду ее малости. При оценке влияния инерционности ОУ на работу интегратора необходимо учитывать также следующее обстоятельство. Из формулы (6-8) мы видели, что постоянная времени ОУ входит в передаточную функцию ОУ в виде х/К, т. е. уменьшенной в К раз. Но это справедливо лишь до тех пор, пока ОУ работает на линейном участке характеристики. Емкость цепи частотной коррекции ОУ, определяющая постоянную времени ту, обычно включается на выходе усилительного каскада. Это приводит к тому, что при скачке сигнала на входе усилительный каскад может войти в насыщение вследствие обусловленного постоянными времени ту и тВЫх запаздывания сигнала ООС. В результате замкнутый контур передачи сигнала (усилитель и ООС) 0 ... 41 42 43 44 45 46 47 ... 82 |












