Раздел: Документация
0 ... 106 107 108 109 110 111 112 ... 143 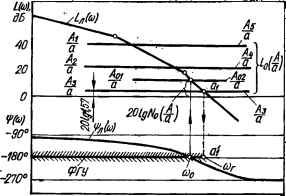 /10100 а Рис. 10.19. К примеру исследования автоколебаний системы с релейным элементом, имеющим однозначную характеристику с зоной нечувствительности. Пользуясь выражением для логарифмической амплитудной характеристики нелинейного элемента L0 (А/а) = - 20 lg д0 (А/а) = - 20 lg /l-щг . полученной на основании формулы (10.14), или с помощью кривой Z0(A/a) (табл. 10.1), можно построить семейство логарифмических характеристик нелинейного элемента. Особенностью релейного элемента с зоной нечувствительности является то, что с увеличением А/а значение L0 (А/а) вначале уменьшается — амплитудная характеристика нелинейного элемента перемещается вниз (характеристики AJa, AJa, AJa) до значения L0 (AJa) = 20 lg 1,57 при AJa = ]/2, а затем при дальнейшем увеличении Ala L0 (A/a) увеличивается — амплитудная характеристика перемещается вверх (характеристики AJa, AJa, AJa). Фазовые характеристики % (А/а) нелинейного элемента при любом значении А/а и ФГУ совпадают с линией —180°. Для определения правой граничной частоты ФГУ точку пересечения ЛАЧХ линейной части с нижней граничной амплитудной характеристикой (AJa) семейства амплитудных характеристик нелинейного элемента (точка аг) сносим по вертикали на фазовую характеристику нелинейного элемента в точку а\. ФГУ совпадает с отрезком линии я]з (со) = —180° до частоты соГ) соответствующей найденной точке ai. Штриховка ФГУ снизу соответствует перемещению амплитудной характеристики нелинейного элемента вниз с увеличением А/а, а штриховка сверху — перемещению характеристики вверх. Из рис. 10.19 видно, что фазо-частотная характеристика линейной части я)л (со) пересекается с ФГУ, следовательно, в системе возможны автоколебания на частоте со0. В рассматриваемой системе возможны автоколебания с относительной амплитудой А01/а, значение которой находится между AJa и AJa, и с относительной амплитудой А/а, которая определяется интерполяцией между значениями As/a и Aja. Амплитудная характеристика L0 (Л01/а) относится к той части семейства амплитудных характеристик нелинейного элемента, в которой амплитудная характеристика с увеличением Ala перемещается вниз, а характеристика L0 (Л02/а) — к той части, где с увеличением А/а амплитудная характеристика перемещается вверх. Поэтому, учитывая, что фазовая характеристика линейной части при увеличении со пересекает ФГУ сверху, в соответствии с приведенным выше правилом, автоколебания системы с относительной амплитудой Л02/а будут устойчивы, а с относительной амплитудой А01/а — неустойчивы. На практике не обязательно строить семейство амплитудных характеристик нелинейного элемента, а можно ограничиться построением лишь характеристики с наименьшим значением L0 (А/а) (в рассматриваемом примере L0 (А/а) = 20 lg 1,57). В этом случае для нахождения амплитуды автоколебаний непосредственно по рисунку определяют ординату ЛАЧХ линейной части системы на частоте со0: 20 lg koN„ (со0) = 12 дБ. По условию (10.23) 20 lgN0 (А/а) = = 20 lg k0N„ (to0) = 12 дБ, откуда N0 (А/а) = 4. По графику Z0 (А/а) для релейной характеристики с зоной нечувствительности (табл. 10.1) определяем значения относительной амплитуды возможных автоколебаний: А01/а = 1,6 и А/а = 4,6. Пользуясь правилом определения устойчивости автоколебаний, находим, что автоколебания с относительной амплитудой Л02/а = 4,6 являются устойчивыми, а с относительной амплитудой А01/а =1,6 — неустойчивыми. Амплитуда устойчивых автоколебаний на входе нелинейного элемента Л02 = = 4,6а. 10.8. Способы устранения автоколебаний нелинейных САУ и уменьшения их амплитуды Как отмечалось, в нелинейных системах возможно появление автоколебаний. Если эти автоколебания желательны или допустимы, возникает задача уменьшения их амплитуды. В тех же случаях, когда автоколебания недопустимы, стоит задача их устранения. Один из способов устранения автоколебаний или уменьшения их амплитуды заключается в соответствующей деформации логарифмических частотных характеристик линейной части системы. Автоколебания можно устранить, если добиться, чтобы фазо-частотная характеристика линейной части системы \рл (со) не пересекала кривую ФГУ. Вид деформированной ФЧХ показан на рис. 10.20 пунктирной кривой Для уменьшения амплитуды автоколебаний нужно стремиться к тому, чтобы кривая грл (со) пересекала ФГУ в точке, соответствующей меньшим значениям относительной амплитуды автоколебаний. Для уменьшения амплитуды автоколебаний обычно следует перемещать точку пересечения характеристик в область более высоких частот, например из точки В в точку С (рис. 10.20): 20 lg iV0 (Л02/с) < Ш), дБ 40 .20 О 9(a) 90е 180° 270е
Рис. 10.20. К устранению автоколебаний н уменьшению их амплитуды за счет деформации частотных характеристик линейной части системы. 10 100 а <20 lg N0 (AJa), N0 {AJa) < N0 (A01/a); в соответствии с графиком Z0 (Ala) = N0 (Ala) (табл. 10.1) Лоа/а< <A01/a. Желаемая деформация частотных характеристик линейной части системы осуществляется обычно с помощью линейных или нелинейных корректирующих устройств. Эффективным способом подавления автоколебаний является наложение на релейный элемент вынужденных колебаний достаточно высокой частоты по сравнению с частотой автоколебаний. Такой метод подавления называют вибрационной линеаризацией нелинейной характеристики релейного элемента. Вариант схемного осуществления вибрационной линеаризации характеристики реле изображен на рис. 10.21, а. На дополнительную обмотку реле Р подается переменное напряжение из от постороннего источника. Период колебания этого напряжения должен быть значительно больше времени срабатывания реле, чтобы обеспечить четкий режим работы реле. С другой стороны, частота колебаний должна быть по возможности выше, чтобы гармоники выходного колебания реле (в том числе первая гармоника) имели более высокую частоту и лучше подавлялись системой. 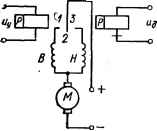 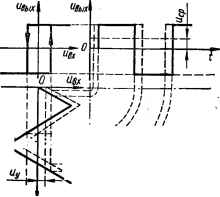 <f-h----\— // 0 ... 106 107 108 109 110 111 112 ... 143 |












