Раздел: Документация
0 ... 110 111 112 113 114 115 116 ... 143 Компенсация зоны нечувствительности Необходимо компенсировать зону нечувствительности (см. рис. 1.18, г), описываемой выражением (Опри х* (t) < Ьи; I— sign х* + fcHx* (г) при х*(А>&„, где /гн, fcH — коэффициент усиления нелинейного элемента на линейном участке характеристики и половина зоны нечувствительно соответственно, т. е. необходимо добиться линейной зависимости *вых(0 = М()-(Ю.43) Подставив значение х* (t) из (10.41) в (10.42), получим 0 при *(0 + M*)KV. F (х*) = F„ (х) = - KbH + kBF1 (х) + kKx (t) при [x (t) + Fi (x)] > fcH; feH6„ + Л/", (x) + къх (t) при [X (t) + Ft (X) ] < — 6„, (10.44) где f3 (*) — эквивалентная характеристика цепи между точками А и В. Из (10.44) следует, что при выполнении условий — КК + № (*) = 0 ПРИ I* (0 + Fi (*)1 > М *А + *Л (*) = 0 при [х (0 + Ft (х)] < — 6И J нелинейная функция F (х*) = fcHx (г) при х (/) + F, (х) > 6И. Условия (10.45) будут выполнены, если Ft (х) представляет собой знаковую функцию сигнала х (/): f1(x) = 6Hsignx(r),(10.47) т. е. если на вход компенсируемой нелинейности будет подаваться (10.45) (10.46)
ХеьиФ CI f(x*)
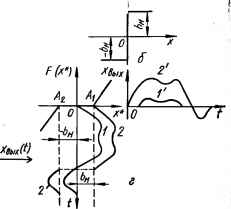 Рис. 10.28. Компенсация нелинейности F(х*) введением нелинейных прямых связей: а — общая схема компенсации; б — статическая характеристика компенсирующей нелинейности Ft Ос); в — схема компенсации зоны чувствительности F (х*); г — графическая иллюстрация компенсации зоны нечувствительности. сигнал смещения, определяемой формулой (10.47), который можно получить с помощью идеального релейного элемента со статической характеристикой, изображенной на рис. 10.28, б. Очевидно, если Ft (х) определяется формулой (10.47), то при всех значениях х (t) будет выполняться неравенство х (f) + Fx (х) I = I x (f) + Ья sign x (t) I > Ья и, следовательно, в соответствии с (10.44) линейная зависимость Fs (х) = k„x (0 будет иметь место при любых значениях входного сигнала, в том числе и при х (г) < Ьл. Выходной сигнал соединения элементов (рис. 10.28, а) хвых (0 = F9 (х) + F2 (х) = kRx (t) + F2 (x). Из сравнения последнего выражения и (10.43) следует, что линейная зависимость будет достигнута при F2 (х) = 0, т. е. для компенсации зоны нечувствительности достаточно одной нелинейной компенсирующей связи, как показано на рис. 10.28, е. В соответствии с формулой (10.47) и рис. 10.28, в условие компенсации зоны нечувствительности можно записать в виде х* (г) = х (г) + Ft (х) = х (0 + К sign х (0, т. е. на вход нелинейного элемента вместе с сигналом должна поступать его знаковая функция. Графически метод компенсации зоны нечувствительности иллюстрируется на рис. 10.28, г. При х (г) > 0 с выхода компенсирующего релейного элемента Ft (х) на сумматор С1 подается сигнал смещения, равный половине зоны нечувствительности Ьн, благодаря чему рабочая точка перемещается из точки О в точку Аг. При х (г) < 0 рабочая точка перемещается из точки О в точку А2. Графики входного / и выходного Г сигналов нелинейного элемента с зоной нечувствительности свидетельствуют о вносимых нелинейных искажениях. Для случая компенсированной зоны нечувствительности входной и выходой сигналы изображены кривыми 2 и 2 соответственно. Из рисунка видно, что при подаче на вход нелинейного элемента, соответствующего смещению, нелинейный элемент превращается в линейный. Расширение линейной зоны статической характеристики нелинейности типа насыщения Схема расширения линейной зоны статической характеристики не линейности F (х*) типа насыщения (рис. 1.18* в) с помощью компенсирующих нелинейных прямых связей Ft (х) и F2 (х) изображена на рис. 10.29, а. Компенсирующие нелинейности, синтезированные рассмотренным выше методом, представляют собой релейные элементы. Зоны нечувствительности реле равны зоне Ьл линейного участка статической характеристики, а выходные сигналы релейных элементов Ft (х) и F2 (х) при х (г) 1> Ьл равны Ьл и значению насыщения с соответственно. При х (f) < Ьл реле не срабатывают, х* (г) = х (t) и работа происходит на линейном участке статической характеристики / (рис. 10.29, б). При х (t) -+ Ъл хх (0 = xBbUt (t) с. При х (t) > 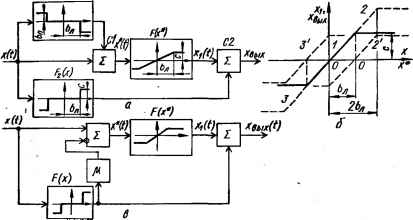 Рис. 10.29. Расширение линейной зоны нелинейности типа насыщения: а — схема расширения линейной зоны статической характеристики в два раза; б — построение статической характеристики соединения элементов (а); в — упрощенная схема расширения линейной зоны. Ьл х* (t) — х {t) — Ьл, т. е. на вход компенсируемой нелинейности поступает разностный сигнал. Если х (t) = Ьм, то х* (t) = 0, хх (t) = = 0. Это соответствует переносу начала координат и всей статической характеристики из положения 1 вправо на величину Ьл в положение 2. Для того чтобы восстановить сигнал на выходе при х (t) = Ьл, одновременно с подачей сигнала смещения на вход нелинейного элемента F (х*) с компенсирующего релейного элемента F2 {х) сигнал смещения, равный с, подается в сумматор С2 на его выходе, где складывается с выходным сигналом хх (г) компенсируемой нелинейности. В результате такого сложения при х (0 = Ьл, когда хг (t) = 0, выходной сигнал схемы хвых (г) = с. Это соответствует перемещению характеристики 2 вверх на величину сигнала смещения с в положение 2. Аналогично при поступлении сигнала отрицательной полярности в случае х (i) —Ь„ работа будет происходить на участке 3 статической характеристики. Таким образом, благодаря подаче соответствующих сигналов смещения на вход и выход компенсируемой нелинейности его линейная зона расширяется в два раза. Включая параллельно п компенсирующих цепей, можно расширить линейную зону нелинейности типа насыщения в п + 1 раз. Принимая во внимание, что релейные элементы Ft (х) и F2 (х) имеют равные зоны нечувствительности и отличаются лишь значениями выходных напряжений, можно два компенсационных реле заменить одним релейным элементом F (х) и усилительным элементом р. (рис. 10.29, в). В тех случаях, когда нельзя использовать входной сигнал (фазовые, частотные, временные дискриминаторы), для формирования компенсирующих смещений используется выходной сигнал компенсируемой нелинейности, т. е. компенсация нелинейности достигается введением обратной и прямой нелинейных компенсирующих связей [23]. 0 ... 110 111 112 113 114 115 116 ... 143 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












