Раздел: Документация
0 ... 132 133 134 135 136 137 138 ... 143 им J" № at —щ c/J dfit DIV дь уосэуВ системах с управлением по произ- водной скорость движения к экстремуму пропорциональна значению производной dl/d\i, а направление движения определяется ее знаком. Движение (изменение управляющего воздействия р) прекращается, как только достигается экстремальное значение критерия оптим&аьности /, когда про- г, Т in лизводная dl/du = 0. Рис. 12.19. Функциональная„п схема СЭУ с управлением по Данным системам присущи определенные производной.недостатки. В частности, в момент включе- ния СЭУ необходимо подавать некоторый сигнал для изменения управляющего воздействия р, так как в противном случае diildt = 0, dlldt = 0 и задача поиска экстремума становится неопределенной. В процессе работы также возможны случаи, когда d[i/dt = 0, а следовательно, dlldt 0. Изменение / может вызываться не только управляющим, но и различными возмущающими воздействиями (следствием чего является дрейф статической характеристики объекта), что приводит к отклонению измеренного значения производной dl/du от ее истинного значения, а следовательно, к увеличению времени движения к экстремуму и дополнительным погрешностям поддержания экстремума. Кроме того, дифференциаторы чувствительны к шуму. Указанные недостатки ограничивают практическое применение рассмотренных СЭУ. На рис. 12.20, а изображен другой вариант функциональной схемы СЭУ с измерением производной. В отличие от описанной выше системы здесь измеряется лишь одна производная dlldt. Для этого служит дифференциатор Д. С выхода Д производная поступает на сигнум-реле CP, выходная величина которого может принимать значения ±сУ0. Полярность С10 изменяется при изменении полярности входного сигнала, т. е. dlldt. Рассмотрим работу системы. Пусть объект О СЭУ является безынерционным, имеет статическую характеристику / = / (р), изображенную на рис. 12.20, б, и в момент включения состояние СЭУ определяется значениями управляющего воздействия рх и управляемой величины 1Х (точка Мх на статической характеристике). Предположим, что в момент /х включения системы на выходе CP возникает положительный сигнал +с7„ (рис. 12.20, в). Этот сигнал, поступая на исполнительный механизм ИМ, в качестве которого обычно применяется интегратор (например, двигатель), вызывает увеличение его выходной величины — управляющего воздействия р, (рис. 12.20, г). Под влиянием р управляемая величина / на выходе объекта будет изменяться (увеличиваться) (рис. 12,20, д) в соответствии со статической характеристикой. Производная dlldt при изменении / от точки Мг до М2 уменьшается (рис. 12.20, ё) и в момент времени /2, когда / достигает своего максимального значения, dlldt = 0. Однако в точке экстремума система не остановится, а за счет зоны нечувствительности А сигнум-реле CP будет продолжать движение, удаляясь от экстремума в противоположную сторону до тех пор, пока отрицательное значение производной dlldt не превысит зоны нечувствительности 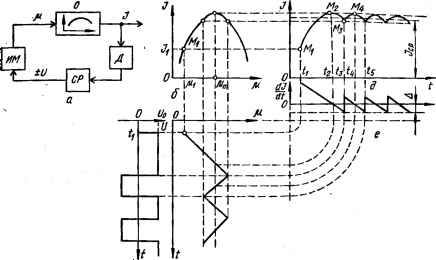 в Рис. 12.20. Система экстремального управления с одним дифференциатором: а — функциональная схема; б — экстремальная характеристика I — f (И) объекта 0; в —» форма сигналов на выходе сигнум-реле CP; е — график изменения управляющего воздействия ц (/); д, е — кривые изменения управляемой величины J (f) н ее производной dlld\x во времени. сигнум-реле (момент времени t3). Тогда сигнум-реле сработает и изменит полярность сигнала U0 на своем выходе, что вызовет реверс исполнительного механизма, а следовательно, уменьшение управляющего воздействия р. Управляемая величина / снова станет приближаться к экстремальному значению. Производная dlldt в момент реверса t3 изменяет знак — становится положительной и при движении от точки М3 до Л44 уменьшается по величине. В точке /Й4 (момент времени tt) величина / снова достигает своего максимального значения, а производная dlldt =?0, но благодаря зоне нечувствительности сигнум-реле движение системы будет продолжаться в прежнем направлении. В момент времени t&, когда отрицательное значение dlldt превысит зону нечувствительности, сигнум-реле изменит полярность сигнала U0 и т. д. Таким образом, в системе возникнут незатухающие колебания вокруг экстремальной точки. Если объект СЭУ является инерционным, то в результате запаздывания управляемой величины / относительно р увеличивается амплитуда колебаний системы, а следовательно, уменьшается среднее значение /ср. Метод запоминания экстремума. СЭУ с запоминанием экстремума Системы с запоминанием экстремума реагируют на разность между наибольшим значением управляемой величины /тах, достигнутым в предыдущие моменты времени, и текущим его значением /. Управ- \Uo=±1 \ИМ\ cp к- JSC -ы- up u8x=J If о a* Рис. 12.21. СЭУ с запоминанием экстремума: о —" функциональная схема; б — схема запоминающего устройства. ляемая величина / подается на запоминающее устройство ЗУ (рис. 12.21), которое фиксирует только увеличение / (запоминание происходит только при увеличении /). Сигнал /тах с запоминающего устройства и текущее значение управляемой величины / непрерывно сравниваются в элементе сравнения ЭС. Сигнал разности А/ = / — /тах с выхода ЭС поступает на сигнум-реле СР. До тех пор, пока А/ > О, с выхода CP на исполнительный механизм ИМ (обычно интегрирующее устройство) поступает сигнал постоянной величины одной полярности. При этом осуществляется непрерывное движение системы к экстремуму. При достижении экстремума А/ = 0, однако сигнум-реле CP обладает зоной нечувствительности и оно не срабатывает. При этом р продолжает изменяться в прежнем направлении (например, в сторону увеличения), вызывая уменьшение /. При прохождении через экстремум А/ изменяет свой знак. Как только А/ превысит значение зоны нечувствительности, сигнум-реле срабатывает, на ИМ подается сигнал другой полярности и изменяется направление движения р (в сторону уменьшения) и т. д. В результате устанавливаются колебания системы вокруг экстремума управляемой величины. Запоминающее устройство ЗУ можно реализовать несколькими способами. Вариант схемы ЗУ изображен на рис. 12.21, б [28]. На запоминающий конденсатор С через диод VD поступает напряжение «вх, пропорциональное управляемой величине / системы. При увеличении / диод VD пропускает ток заряда конденсатора С. Пренебрегая падением напряжения на VD, можно считать, что потенциалы точек А и Б равны, а выходное напряжение схемы ивых = I — /тах= 0. При уменьшении / потенциал точки А становится меньше потенциала точки Б, диод VD запирается, на выходе схемы возникает напряжение «вых = «аб. Это напряжение пропорционально разности между текущим значением / и максимальным его значением /щах, достигнутым в предыдущий момент (до начала уменьшения /) времени. При превышении значения ивых зоны нечувствительности сигнум-реле последний сработает, изменит полярность сигнала U0 и произойдет реверс исполнительного механизма. При срабатывании CP контакт К кратковременно замыкается, конденсатор С разряжается до текущего значения ивх, потенциалы точек А и Б сравниваются и происходит сброс запомненного ранее значения ывх = /щах- При 0 ... 132 133 134 135 136 137 138 ... 143 |












