Раздел: Документация
0 ... 134 135 136 137 138 139 140 ... 143 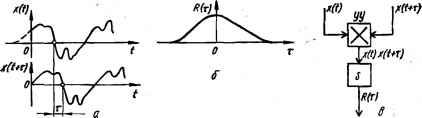 Рис. 12.23. Коррелятор: а — сигналы i (О и л (f + т); б — корреляционная функция R (т); е — схема. Корреляционная СЭУ, находя и поддерживая максимум корреляционной функции R (т), обеспечивает совмещение во времени сигналов. Решение задачи совмещения во времени двух сигналов имеет самостоятельное значение, например, для выравнивания временных запаздываний при прохождении сигнала через различные каналы, а также косвенно используется для определения скорости движения объекта без непосредственного контакта с неподвижной поверхностью. Последняя задача особенно важна, когда контактные методы полностью исключаются, например при определении скорости летательного аппарата относительно Земли, скорости космического корабля относительно небесных тел, измерении скорости движения горячего проката. Корреляционные СЭУ в последние годы начинают широко применяться также для определения дальности до цели, угловых координат цели в радиолокации, гидролокации, а также в авиационной и космической навигации для слежения за спутниками и космическими кораблями, измерения скорости при мягкой посадке на Луне [4, 29]. Корреляционные СЭУ в навигации применимы для определения положения движущихся объектов. В этом случае задача состоит в совмещении карты местности с изображением последней на экране радиолокатора по максимуму двумерной корреляционной функции [29]. Данная задача является частной задачей распознавания образов корреляционными методами. В корреляционных СЭУ коррелятор является управляемым объектом. Корреляционная СЭУ для выравнивания временных запаздываний сигналов В ряде случаев сигнал и (t) (рис. 12.24) от одного и того же источника (генератора) G проходит по двум каналам/(I и/СИ, вносящим различные временные запаздывания тг и т2 (при прохождении сигналов через каналы происходит их декорреляция). Задача состоит в том, чтобы выравнять временные запаздывания сигналов. Эта задача встречается, например, в системах автоматической компенсации помех и может быть решена с помощью корреляционной СЭУ. Сигнал их (t + т,) с выхода канала /(I проходит через блок постоянной задержки БПЗ на время тп, а сигнал «2 (t + т2) с выхода БПЗ  Рис. 12.24. Функциональная схема корреляционной СЭУ для выравнивания временных запаздываний сигналов. канала /Ш — через блок управляемой задержки ту БУЗ. Сигналы с блоков задержки иг (t + т2 + тп) и и2 (t + т2 + ту) поступают на устройство умножения УУ коррелятора, а сигнал, соответствующий корреляционной функции т R(r) = lim ~ \иг(t + тх + rn)u2(t + т2 + xy)dt, Г-оо о где т = тх + тп — т2 — ту, с выхода интегратора 5 коррелятора поступает на систему экстремального управления (экстремальный регулятор) ЭР. Последняя, вырабатывая соответствующее управляющее воздействие р, (t) и изменяя время управляемой задержки ту, находит и поддерживает максимальное значение корреляционной функции R (т). При этом поддерживается также равенство времен запаздывания сигналов, т. е. т2 + тп = т2 + ту, когда т = 0. Объектом управления в данной системе является коррелятор с блоком управляемой задержки. Включение блока БПЗ обеспечивает возможность достижения равенства времен запаздывания в случае, когда сигнал ых (t + tji опережает по времени и в этом случае необходимо было бы выполнить сдвиг сигнала и2 (/ + т2) во времени в сторону опережения, что физически неосуществимо (в противном случае сигнал на выходе БУЗ появлялся бы прежде, чем oh был бы подан на его вход). Автоматизация процесса слежения за максимумом корреляционной функции может осуществляться с помощью беспоисковой (например, дифференциальной) и поисковой СЭУ. Корреляционная дифференциальная СЭУ для выравнивания временных запаздываний сигналов В рассматриваемой СЭУ (рис. 12.25, а) использован принцип сдвига характеристик: кроме управляемого объекта — коррелятора 1 — включена модель объекта — коррелятор 2, характеристика которого R2 (ту — тут2) смещена относительно характеристики Rt (ту — тут1) коррелятора / на Дт (рис. 12.25, б). Это смещение достигнуто включением элемента постоянного запаздывания Дт в цепь подачи сигнала Щ, if + т2 + ту) на умножитель коррелятора 2. Действительно, корреляционные функции, формируемые корреляторами 1 и 2, опреде- R(Ty-Tymj U,(t+T,) 15 \БПд r*r„ Коррелятор 1 \ пирритчшр t 9 ИЭ wo I X 3E I ЩтД 4r i .1 1 * — r,+r„ Рис. 12.25. Корреляционная дифференциальная СЭУ для выравнивания временных запаздываний сигналов: а ■— функциональная схема СЭУ; 6 — статические экстремальные характеристики корреляторов 1 и 2; в — статическая характеристика корреляторов 1 и 2 с устройством вычитания. ляются соответственно формулами 1 гI #!(Ty — %mi)= Hm- \ M + Tj + TM + Ta-f-Tgd*; I Я2(ту — тут2) = lim-gir j u,(t + тх + тп) ы2(t +t2 -f- ту + Дт)Л, 7—>СЮ у (12.7) где Tymi и тут2 — значения управляемых задержек, при которых достигаются максимумы корреляционных функций. Для определения tymi и тут2 составим уравнения в соответствии с формулами (12.7), являющиеся условиями достижения экстремальных значений корреляционных функций: Ti -\- ■п — г — fymi = 0; Ti + т„ — т2 — туш2 — Дт = 0, откуда (12.8) Tymi — 1 "Т~ тп-т2 Tym2 = Tl "T" Тп— Т2 — Дт, т. е., действительно, экстремальные характеристики корреляторов 1 и 2 с учетом элемента задержки Дт сдвинуты на Дт, т. е. Ту — — Tym2 = Дт. Сигналы, соответствующие корреляционным функциям Rt (ту — Tymi) и R2 (ту — тут2), поступают на вычитающее устройство ВУ, на выходе которого возникает сигнал Д R (Ту) = Rt (Ту — Тут,) — #2 (Ту — хут2). Статическая характеристика AR (ту) корреляторов / и 2 с учетом вычитающего устройства проходит через 0 при ту = iyml — Дт/2 0 ... 134 135 136 137 138 139 140 ... 143 |












