Раздел: Документация
0 ... 21 22 23 24 25 26 27 ... 87 и практического применения в электроприводах. Предпосылками к применению ВИД явились [11]: создание силовых электронных ключей с высоким быстродействием и малыми потерями; опыт создания шаговых двигателей; опыт применения принципов широтно-импульсной модуляции при управлении асинхронными двигателями; развитие микропроцессорной техники, что сняло ограничения на применение сложных алгоритмов управления. Основные достоинства ВИД: простота конструкции и связанная с этим экономия материалов, что определяет низкую стоимость машины даже по сравнению с асинхронным двигателем с короткозамкнутым ротором; простота преобразователя, от которого питается двигатель, представляющий собой силовой вентильный коммутатор с односторонней проводимостью тока. К числу недостатков двигателя относятся: необходимость использования датчика положения ротора или заменяющей его электронной схемы; трудность реализации плавного движения и обеспечения приемлемой шумности, что достигается путем формирования сложной формы токов в обмотках полюсов статора. В отличие от асинхронных и синхронных двигателей в ВИД электромагнитный момент создается не в результате взаимодействия между вращающимся магнитным полем статора и токами ротора, а за счет несимметрии магнитной системы. Принцип действия вентильно-индукторного двигателя на примере четырехфаз-ной машины поясняет рис. 3.6. На каждом из двух находящихся друг против друга полюсов явнополюсного статора располагаются катушки, соединенные последовательно и согласно. Две катушки образуют фазные обмотки статора Ах - А2, Вх-В2, Сх - С2 и Д -- D2. Они получают питание от источника постоянного тока с напряжением Ud через вентильный силовой коммутатор, каждая фаза которого обеспечивает протекание тока через нагрузку от плюса к минусу источника. Ротор зубчатый, обмотки на роторе нет. Характерной особенностью ВИД является то, что число зубцов его ротора не равно числу полюсов статора. Число полюсов статора определяется выражением Zc = 2кхт, где к{ - целое число; т - число фаз. Число полюсов (зубцов) ротора Zp не может выбираться произвольно и определяется в соответствии с формулой Zp = 2(к2т ± 1), где к2 - целое число. 74 В двигателе, показанном на рис. 3.6, число фаз равно 4, коэффициент кх, так же как и к2, принят равным 1, в результате чего число полюсов статора равно 8. Число зубцов ротора в зависимости от выбранного знака в формуле для гр может быть 6 (см. рис. 3.6) либо 10. На рис. 3.6 показано положение ротора, при котором ток от источника протекает через транзисторные ключи фазы В коммутатора и обмотки Ву и В2 полюсов статора, а ось ротора совпадает с осью этих обмоток. Другие фазы статора током не обтекаются. Магнитные силовые линии замыкаются через два полюса статора, обмотки которых в данный момент обтекаются током, два зубца и тело ротора и далее через ярмо магнитной системы статора. Если теперь закрыть транзисторы фазы В и открыть транзисторы фазы А, то током будут обтекаться обмотки Ах и А2, что соответствует повороту вектора потока статора на 45° по часовой стрелке. Ротор под действием поля статора будет поворачиваться до совпадения оси ближайшей пары зубцов с осью обмотки Ах-А2. Эта пара зубцов ротора на рисунке помечена точками. Ротор повернется на 15° в сторону, противоположную направлению поворота вектора магнитного потока статора. Если после фазы В открыть транзисторы фазы С, то вектор магнитного потока повернется против часовой стрелки на 45°, а ротор - по часовой стрелке на 15°. Таким образом ВИД обладает электромагнитной редукцией, т. е. скорости поля статора и ротора двигателя не равны друг другу. В рассматриваемом случае коэффициент редукции кр = 3. Вращение ротора в сторону, противоположную направлению вращения поля 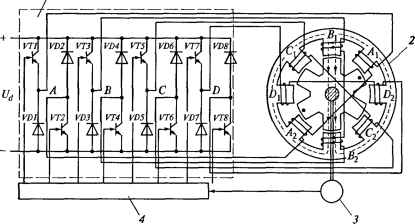 Рис. 3.6. Структура вентильно-индукторного двигателя: 1 - силовой коммутатор; 2 - двигатель; 3 - датчик положения ротора (ДПР); 4 - система управления (СУ) статора, - особенность двигателя, у которого число зубцов ротора меньше, чем число полюсов статора. При Zp> Zc ротор вращается в ту же сторону, что и поле статора. Так, если бы в формуле для числа зубцов ротора был выбран плюс, то число зубцов ротора надо было бы сделать равным гр = 10, т.е. большим, чем число полюсов статора. Тогда ротор вращался бы в ту же сторону, что и поле, а коэффициент магнитной редукции вырос бы до кр = 5. Для того чтобы ротор двигателя совершал непрерывное вращение, необходимо последовательно подключать к источнику питания обмотки смежных полюсов статора. Эти переключения должны осуществляться в зависимости от положения ротора. На рис. 3.7 [15] показан алгоритм переключения ключей силового коммутатора. Угол открытого состояния каждого основного (нечетного) транзистора составляет 2п/т, угол отрытого состояния каждого вспомогательного (четного) - п. Формирование од- г771Щ1т) ГГ2111111п111111 VT3 VT4 VTS VT6 VT7 кгегшпшгй- пинии мшит 1IIIMMII lllllllllllilllllllllll uniinmi liilllilllllliiiiin i i i i i i i i i VTl L VT3 UZU ; VT7 i 2 n/m In ! e2 Рис. 3.7. Формирование токов в обмотках фаз вентильно-индукторного двигателя 0 ... 21 22 23 24 25 26 27 ... 87 |












