Раздел: Документация
0 1 2 3 4 5 6 ... 87 обмоток фаз статора и ротора соответственно; ilA, i2a - мгновенные значения токов в фазных обмотках статора и ротора; ШХА, - полные потокосцепления фазных обмоток статора и ротора, создаваемые как током в рассматриваемой обмотке, так и токами во всех остальных обмотках фаз статора и ротора: У\а = LMilA + LABiiB + LACilc + Lfai-ia + LAbi2b + LAci2c; 2a = LaAhA + Afil£ + LaChC + Am2o + Labi2b + LaJ2c, где LM, Laa - полные индуктивности фазы статора и фазы ротора соответственно, определяемые главными потокосцеплениями и потокосцеплениями в фазах А и a; LAB, LAC, Lab, Lac - коэффициенты взаимоиндукции между обмоткой А фазы статора и двумя другими его обмотками, сдвинутыми относительно нее на 120 и 240 эл. град, и между обмоткой а ротора и двумя другими обмотками ротора; LAa, LAb, LAc, LaA, LaB, LaC- коэффициенты взаимоиндукции между обмоткой А фазы статора и обмотками ротора и между обмоткой а фазы ротора и обмотками статора, зависящие от положения ротора относительно статора в каждый данный момент времени, Lab = LAC = Lab = Lac = cos(2ji/3) = A«p cos(4ti/3) = -0,51. Полные индуктивности фазы статора и фазы ротора находим по формулам: Laa = Аиф + Ао \ Аю = Ь„ф + Аа, где Ьтф - главные индуктивности фаз; Lic, L2c - индуктивности рассеяния фазы статора и фазы ротора соответственно. На рис. 1.1, с показано взаимное расположение обмотки А статора и обмоток а, Ь, с ротора при некотором мгновенном значении угла поворота ротора в пространстве 62 и числе пар полюсов двигателя рп = 1 (при числе пар полюсов больше единицы 02 есть угол в эл. рад). Отсчитывая углы против часовой стрелки, коэффициенты индуктивности, характеризующие влияние токов в фазах ротора на потокосцепление обмотки фазы А статора, можно представить в виде: А*о - Апф COS 02 > LAb = A«pCos(e2 +2я/3); Lac = Аиф cos(G2 + 4ji/3) = А„ф (cos92 -2п/3). 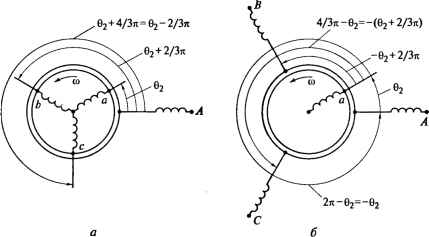 Рис. 1.1. Взаимосвязь обмоток статора и ротора асинхронного двигателя: а - обмотка статора и обмотки ротора; б - обмотка ротора и обмотки статора Коэффициенты взаимоиндукции, учитывающие влияние токов статора на потокосцепление обмотки фазы а ротора (рис. 1.1, б) записываются в виде: LaA = 4,ф cos (2л - 62) = 4,ф cos G2; 1ав = A*j> cos (2я/3 - е2) = Ьтф cos(62 - 2я/3); Ас = A*t> cos (4я/3 - G2) = АиФ cos (62 + 2я/3). С учетом изложенного для фазы А статора и фазы а ротора система уравнений, описывающих электромагнитные процессы, примет вид: Щл=Ыл+1(11) ш «2»=+;(1.2) at Чы = (Апф + Ас )м 0> 5Алф - 0,5Ьтф цс + +А„ф [cosG2 i2a + cos(G2 + 2n/3)/2i + cos (G2 - 2я/3)/2с]; (1.3) 2о - (Апф + Lla)ha 0>5Z /2i -0,5Хиф /2с + +А„ф [cosG2 ilA + cos(G2 - 2n/3)/1B + cos (G2 + 2я/3)/1С]. (1.4) 1.2. Т-образная схема замещения асинхронного двигателя Для построения схемы замещения надо воспользоваться методом комплексных амплитуд, переписав уравнения (1.1) и (1.2) для напряжений, токов и потокосцеплений в комплексной форме: где UlA, ilA, ч>1А, U2a, i2a, xP2fl - векторы напряжения, тока, по- токосцепления статора и ротора соответственно. Во втором из этих уравнений может быть произведена замена Юр = s(£>03Jl; где s - скольжение; со - угловая скорость двигателя. Для представления в комплексной форме уравнений (1.3) и (1.4) сомножители в виде косинусов надо преобразовать в комплексную форму с помощью формул Эйлера, имея в виду, что угол поворота ротора в эл. рад определяется как 02 = pn<$t: eJp„at + e-Jp„at cosG2 = cos (рпш)=---; cos(62 + 2я/3) = cos(pnco/ + 27i/3) =---; еКрпш-2ф) + е-ираШ-2ф) cos(G2 - 2я/3) = cos(pncof - 2я/3) =---. Токи статора и ротора должны быть записаны в комплексной форме: hA -» 1ха&щз*\. ha -» /2йе; Чв -» 1\в еуМОэл = ilAeJ-2"M; i2b -» i2beJ = 12аен-2ф); he -» 1\с&Щш = iiAeJ«*»,-Aa3>; /2с -» /2cey<V = /2йеУ(-4л/3). 13 0 1 2 3 4 5 6 ... 87
|
