Раздел: Документация
0 ... 3 4 5 6 7 8 9 ... 87 ВАС 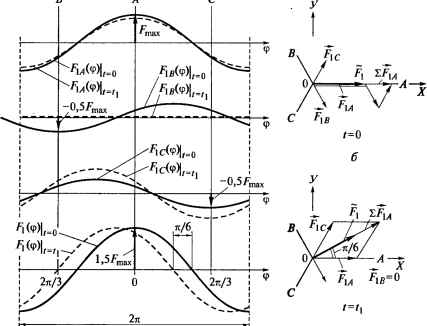 в а Рис. 1.4. Пространственный вектор в трехфазной системе: а - пространственное распределение МДС; б, в - пространственный вектор МДС при (=0и(=( соответственно мени t\, которому соответствует сооэл п/6, то мгновенные значения магнитодвижущих сил будут: F\a (О Ц = А,ах cos (я / 6) = 0,866,Гтах; Fib (О Ц = Апах со8(я/6 - 2я/3) = 0; Ас (0 U, = Апах С08(я/6 + 2Я/3) = 0,866. Соответствующие пространственные зависимости, а также результирующая МДС статора для этого момента времени А(ф) 1/=/,, показаны на рис. 1.4, а штриховыми линиями. Таким образом, за время tu равное 1/12 части периода напряжения питания, максимум результирующей МДС переместился в пространстве против часовой стрелки на угол Дф = я/6 эл. рад. Этот эффект может быть проиллюстрирован и на векторных диаграммах, изображенных на плоскости х-у, перпендикулярной оси машины, и представленных на рис. 1.4, б, в. Для тех же моментов времени ы0эл t = 0 и coOMf = показаны временные векторы FiA, FlB и FiC, направленные по осям обмоток статора А, В и С с учетом их знака. Там же для двух рассматриваемых моментов времени показан вектор, равный геометрической сумме векторов £ F\ = FXA + FiB + FiC. Как видно из сравнения этих двух рисунков, вектор за время tx повернулся в электрическом пространстве на угол я/6 эл. рад. против часовой стрелки, чему соответствует поворот максимума МДС в физическом пространстве на угол п/(6рп). Таким образом, возникает эффект вращения электрического поля. При Ыоэл = 314 рад/с (/ = 50 Гц) угловая скорость поля в физическом пространстве: при рп = 1 равна 314 рад/с; при рп = 2- 157 рад/с; при р„ = 4 - 78,5 рад/с и т.д. Модуль суммарного вектора равен l,5Fmax, т.е. в полтора раза больше амплитудного значения МДС. Для того чтобы в дальнейшем оперировать с амплитудным значением магнитодвижущей силы, надо умножить вектор F на 2/3. Рассматривая плоскость, в которой вращается вектор £ F, как плоскость комплексного переменного, и направляя ось вещественных по оси обмотки А, можно записать выражение для пространственного вектора: где F]A, F]B, FIC- мгновенные значения фазных МДС. Введем в рассмотрение матрицу-строку где a = еэ = -1/2 + jЛ/2; a2 =е з = -1/2-у Л/2. Таким образом, можно представить пространственный вектор МДС в виде: где F, - матрица-столбец мгновенных значений МДС фаз. Матрица-столбец записывается как (.2л.4л "\ F\ = - FXA+ FlBe з + F]Ce j F\ = aF, (1.11)  Таким образом, может быть сформулировано правило получения пространственного вектора из мгновенных значений переменной. Для получения пространственного вектора трехфазной системы переменных надо матрицу-столбец мгновенных значений этой переменной умножить слева на матрицу-строку а. Поскольку плоскость, в которой вращается пространственный вектор, рассматривается как плоскость комплексного переменного, можно, нанеся на нее связанные с неподвижным статором оси координат х и у, представить пространственный вектор в декартовых координатах как F\ = f\x + jf\y, тд,е/1х,/1у - проекции пространственного вектора F[ на оси координат х и j соответственно. Описанное определение пространственного вектора может быть распространено на все другие трехфазные переменные в асинхронном двигателе: напряжения на статоре и роторе, токи в обмотках статора и ротора, потокосцепления статора и ротора. 1.5. Системы координат и их взаимосвязь В подразд. 1.4 пространственный вектор Ft был представлен в неподвижной системе координат х-у. Это прямоугольная система координат, жестко связанная с трехфазной статорной обмоткой, ее ось вещественных х направлена по оси обмотки фазы А (см. рис. 1.4, б, в). Будем помечать векторы, рассматриваемые в этой системе координат индексом х-у. Эта система координат показана и на рис. 1.5. Там же показан пространственный вектор Fx в некотором положении, которое он занимает в данный момент времени. Мгновенное значение угла поворота пространственного вектора относительно оси х обозначено через G. Кроме статорной системы координат может использоваться роторная система d-q, связанная с роторной обмоткой двигателя и неподвижная относительно нее. Она вращается в электрическом пространстве вместе с ротором. Пространственные векторы, рассматриваемые в этой системе координат, будем отмечать индексом d-q, соответствующие индексы будут иметь и проекции векторов на оси d и q. Поскольку было принято, что величины, относящиеся к ротору, имеют индекс 2, угол между осью вещественных d роторной системы и неподвижной осью х статорной системы координат обозначен 62. Надо иметь в виду разницу меж- 0 ... 3 4 5 6 7 8 9 ... 87
|
