Раздел: Документация
0 ... 45 46 47 48 49
п эвм л Счет Ожидание гГп/пмП m 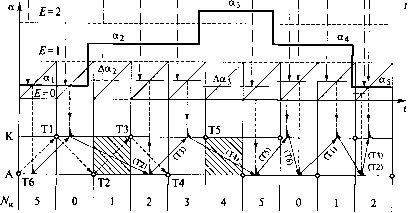 Рис. 8.21. Таблица (а) и диаграмма (б) работы одноканальной СИФУ или Nr[n + 2] = lдля NT[n- 1] = 6. Условиям 2 и 3 соответствуют наклонные стрелки очередности включения тиристоров при увеличении Е на таблице рис. 8.21, а. 4. Если АЕ = -\, то на интервале [п] должны поочередно включаться два тиристора. Сначала при Да = Да0 или NM = NT[n-l] + l Щ[п] = 1 для NT[n - 1] ф 6 для NT[n - 1] = 6. Затем при расчетном значении Дар > Да0 + ук Щп] = К [п] = 1для N; [л] ф 6, или Щ[п] = 1для Щ[п) = 6, но, если Дар < Да0 + ук, то тиристор Nj[п] открывается при Да = = Да0 + ук, где Да0 - минимальный угол открывания, соответствующий временному циклу программы ЭВМ (7эвм)> Ук - Угол коммутации тиристоров. 5. Если АЕ= -2, то на интервале [«] должны поочередно включаться три тиристора. Сначала при Да = Да0 Щ[п] = Nx[n-+ 1для NT[n - I] ф 6 или Щ[п] = 1для NT[n- 1] = 6. Затем при Да = Да0 + ук Щ[п] = N; [п] + 1для NT[n - 1 ] ф б или Щ[п] = 1для Щ[п] = 6. После этого при расчетном значении Да > Да0 + 2ук 7VT"[«] = Щп] + 1для Щ[п] ф 6 или N"T[n\ = 1для Щ[п] = 6, но, если Дар < Да0 + 2ук, то тиристор N" открывается при Да = = Д«о + 2ук. Условиям 4 и 5 соответствуют наклонные стрелки очередности включения тиристоров при уменьшении Ена таблице рис. 8.21, а. Алгоритм цифровой СИФУ, описанный в данных пяти условиях, соответствует максимальному быстродействию с дискретностью в один интервал проводимости ТП. Диаграмма работы одноканальной цифровой СИФУ, соответствующая рассмотренным условиям, показана на рис. 8.21, б. Кружками изображены тиристоры катодной группы К (Т1, ТЗ, Т5) и анодной группы А (Т2, Т4, Т6), открываемые при естественной коммутации, когда а = 0. При изменении а (а,, а2, а3, а4, а5) происходит соответствующая выдержка открывания тиристоров, которая определяется условием равенства заданного ЭВМ уровня шс
БРИ
Т1 Т2 & 1> I Т6 Рис. 8.22. Блоки задержки и распределения импульсов программно-аппаратной СИФУ Да и значением выходного числа счетчика в блоке БЗИ (номера открываемых тиристоров заключены в скобки). Если при увеличении а значение Е возрастает на 1, то на соответствующем интервале (NK =1 и NK = 4) не происходит включение очередного тиристора. Напротив, при значительном снижении а, когда Е уменьшается на 1, на очередном интервале (Л = 0 и NK = 2) включаются поочередно два тиристора. Расчет значений Да, Е, NT и проверка условий выполняются программно ЭВМ на каждом интервале проводимости, начиная с моментов естественного открывания ТП. Программа занимает период Гэвм и определяет соответствующий минимальный угол открывания тиристоров Да0 = сосГэвм. После загрузки блоков БЗИ и БРИ значениями Na и NT ЭВМ переходит в режим ожидания, если на данном интервале должен включиться один тиристор, или в режим прерывания с последующей повторной загрузкой БЗИ и БРИ, если на данном интервале должны включиться два или три тиристора. Блоки БЗИ и БРИ выполняются на основе программируемого таймера (РТ) и регистра (RG) с усилительно-распределительным узлом (рис. 8.22). Точность измерения угла открывания в цифровой СИФУ определяется разрядностью программируемого таймера, который работает на каждом интервале проводимости, равном 60°. Так, при восьмиразрядном таймере точность измерения угла составляет Да0 = 60°/28 ~ 0,23°. Указанная точность распространяется на все изменяемые углы за исключением значений 0°, 60°, 120°. Это объясняется тем, что для быстродействующей СИФУ без дополнительного запаздывания на один такт ТП на каждом интервале проводимости должны быть выполнены и расчет значений Na и NT, и их реализация в виде открывающих импульсов. В результате минимально возможный угол открывания Да0 должен превосходить угол юс7эвм> соответствующий необходимому для расчета Na и NT цик- лу ЭВМ Тэш, т.е. Да„ > сОсГэвм. Тогда при заданных углах а3, равных 0°, 60°, 120°, СИФУ будет открывать тиристоры при углах соответственно Да0, 60° - Да0, 120° - Да0. Для того чтобы угловая неточность СИФУ была одинаковой при всех измеряемых углах, необходимо выполнить следующее условие, касающееся программного цикла ЭВМ: Уэвм-57,3-2"сос-Если п = 8, то Твм - 13 мкс. В интервал времени 7"Эвм должна вписаться вся программа цифровой системы управления - алгоритмы цифровых регуляторов и СИФУ. Если используемая микропроцессорная техника не позволяет выполнить отмеченное выше условие, то в системе управления появляется дополнительное запаздывание на один такт дискретности. При этом расчет выполняется на такте п - 1, а реализация программы - на такте п. Контрольные вопросы 1.Какие элементы в цифровой системе управления вносят в электропривод дискретность по уровню и на какие показатели электропривода может оказывать влияние данная дискретность? 2.Какими расчетными моделями можно представить квантованный по уровню элемент и как выбрать ту или иную модель для системы управления электропривода? 3.Сколько разрядов потребуется в ЦАП с напряжением питания 12 В и каким звеном его можно представить, если для полезного сигнала 62 мВ допустимо отношение сигнал/шум 34 дБ? 4.Какие элементы в цифровой СУЭП вносят дискретность по времени? 5.Определите дискретную передаточную функцию (ДПФ) цифрового регулятора скорости, обеспечивающего минимальное время переходного процесса «в малом», если ДПФ приведенного звена контура скорости W(z) = P,/((z-d)(z-D). 6.Составьте выражение для среднеквадратичной ошибки по угловой координате электропривода (см. рис. 8.17) от квантованности импульсного датчика с Nm импульсами на оборот, если передаточная функция скоростной подсистемы электропривода Wcn(p) = кСп/(Тр+ 1). 7.Какую функцию выполняет в системе управления электропривода с импульсным датчиком скорости блок БС (см. рис. 8.14)? 8.Какое условие должно быть выполнено программной реализацией цифровых регуляторов и системой импульсно-фазового управления, чтобы получить отработку тиристорным преобразователем управляющего сигнала без потери такта в пределах одного интервала проводимости (см. рис. 8.7 и 8.19)? СПИСОК ЛИТЕРАТУРЫ 1.Асинхронные электроприводы с векторным управлением / Под ред. В.В.Рудакова - Л.: Энергоатомиздат. Ленингр. отд-ние, 1987. - 136 с. 2.Башарин А. В., Новиков В.А., Соколовский Г. Г. Управление электроприводами: Учеб. пособие для вузов. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1982. - 392 с. 3.Бессекерский В. А., Попов Е. П. Теория систем автоматического регулирования. - М.: Главная редакция физико-математической литературы, 1972. - 768 с. 4.Борцов Ю.А., Поляхов И.Д., Путов В. В. Электромеханические системы с адаптивным модальным управлением. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1984. - 216 с. 5.Браславский И. Я. Асинхронный полупроводниковый электропривод с параметрическим управлением. - М.: Энергоатомиздат, 1988. - 224 с. 6.Елисеев В.А. Релейно-контакторные системы управления электропривода. - М.: Изд-во МЭИ, 1995. - 144 с. 7.Ивоботенко Б. А., Козаченко В. Ф. Шаговый электропривод в робототехнике. - М.: Изд-во МЭИ, 1984. - 100 с. 8.Ключев В. И. Теория электропривода: Учебник для вузов. - М.: Энергоатомиздат, 1998. - 704 с. 9.Ковчин С.А., Сабинин Ю.А. Теория электропривода: Учебник для вузов. - СПб.: Энергоатомиздат. Санкт-Петербургское отд-ние, 1994. - 496 с. 10.Кузовков Н. Г. Модальное управление и наблюдающие устройства. - М.: Машиностроение, 1976. - 184 с. 11.Мееров М. В. Синтез структур автоматического регулирования высокой точности. - М.: Наука. 1967. - 424 с. 12.Перельмутер В.Н., Сидоренко В. В. Системы управления тиристор-ными электроприводами постоянного тока. - М.: Энергоатомиздат, 1988. - 304 с. 13.Поздеев А. Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах. - Чебоксары: Изд-во Чуваш, ун-та, 1998. - 172 с. 14.Сандлер А. С, Сарбатов Р. С. Автоматическое частотное управление асинхронными двигателями. - М.: Энергия, 1974. - 328 с. 15.Справочник по ТАУ / Под ред. А. В. Красовского. - М.: Наука, 1987. - 712 с. 16.Суптель А. А. Асинхронный частотно-регулируемый электропривод: Учеб. пособие для вузов. - Чебоксары: Изд-во Чуваш, ун-та, 2000. - 164 с. 17.Терехов В.М. Алгоритмы фаззи-регуляторов в электротехнических системах Электричество. - 2001. - № 12. - С. 55 - 63. 18.Терехов В.М. Дискретные и непрерывные системы управления в электроприводах. - М.: Изд-во МЭИ, 1989. - 80 с. 19.Терехов В. M. Непрерывные и цифровые системы управления скоростью и положением электроприводов. - М.: Изд-во МЭИ, 1972. - 768 с. 20.Терехов В. М. Элементы автоматизированного электропривода: Учебник для вузов. - М.: Энергоатомиздат, 1987. - 224 с. 21.Терехов В.М., Овсяников В.Н., СтечнийА.И. Повышение энергетической эффективности солнечных печей Промышленная энергетика. - 1991.-№9.-С. 24-26. 22.Усынин Ю. С. Системы управления электроприводов: Учеб. пособие для вузов. - Челябинск: Изд-во ЮУРГУ, 2001. - 358 с. 23.Фишбейн В. Г. Расчет систем подчиненного регулирования вентильного электропривода постоянного тока. - М.: Энергия, 1972. - 136 с. 24.Цыпкин Я. 3. Теория линейных импульсных систем. - М.: Физмат-гиз, 1963. - 400 с. 25.Шипилло В. П. Автоматизированный вентильный электропривод. - М.: Энергия, 1968. - 400 с. 26.Heidev Н., Tryba V. Energiesparen durch einen adaptiven Fuzzy-Regler fur Heizungsanlagen. Fuzzy-Logik, Theorie und Praxis. - Dortmund: Springer Verlag, 1994.-447 p. 27.Kessler C. Ein Betrag zur Theorie mehrschleifiger Regelungen Regelungstechnik 8. - 1960. - H8. - P. 261-269. 28.Kessler C. Uber die Vorausberechnung optimal abgestimmter Regel-kreise Regelungstechnik 3. - 1955. - H2. - P. 40-45. 29.Simovert Masterdrives Vector Control. Betriebsanleitung Operating Instructions. Siemens AG. - 1998. - 198 p. 30.Zadeh L.A. Fuzzy Sets Information and Control. - 1965. - P. 338-353. 0 ... 45 46 47 48 49 |












