Раздел: Документация
0 ... 44 45 46 47 48 49 /п fa Л /ос Ул Уз2 УъЪ /з /о.е п п п п р п п п
Рис. 8.16. Диаграмма работы блока синхронизации пульсы меняются местами. Диаграмма работы блока синхронизации, соответствующего схемам рис. 8.15, приведена на рис. 8.16. На выходе счетчика D4 (см. рис. 8.14) выделяется цифровой сигнал углового рассогласования AiV = }(/3 - /0.С)А = ЛГ3.П - 7V0X = кт\ Awdt kmAQ. оо Здесь кт - передаточный коэффициент ИД, имп./рад (кт = = ид/2л:, где Nm - число импульсов на оборот ИД); А0 - угол рассогласования, рад. Цифровой сигнал AN преобразуется в ЦАП1 в аналоговый, поступающий в регулятор положения (РП), на выходе которого выделяется задающее напряжение для контура скорости (изс). Величина перемещения, заданная числом импульсом N3n, записывается в счетчике D5. По мере прохождения импульсов / через ключ D1 происходит уменьшение числа на выходе счетчика D5 из-за непрерывного поступления импульсов на его вход вычитания (-1). При обнулении счетчика D5дешифратор D6подает нулевой сигнал на ключ D1, который запирается и прекращает подачу задающих импульсов на суммирующий вход счетчика D4. Задающее напряжение изс на входе регулятора скорости снижается до нуля, и двигатель останавливается. Описанная система управления осуществляет следящий режим отработки электроприводом перемещения с заданной скоростью. Для повышения точности отработки заданной скорости может быть использовано дополнительное задание по скорости N3C, подаваемое через ЦАП2 на регулятор скорости. Если вместо сигналов N3 „ ЦАП 2 к3р ЦАШ
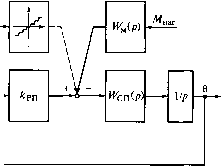 АЦП Рис. 8.17. Структурная схема электропривода, имеющего цифроаналого-вую систему управления с импульсным датчиком положения и N3C, поступающих соответственно на ПКЧ и D5, подать сигнал N3n на счетчик D4, то получим обычный режим позиционирования электропривода без контроля скорости перемещения. В данной цифроаналоговой СУЭП дискретностью по времени можно пренебречь, так как она определяется высокой частотой ГТИ, составляющей порядка 0,5...5 МГц. В большей мере может проявляться квантованность по уровню, обусловленная импульсным датчиком. Способы учета квантованности по уровню описаны в подразд. 8.2. Структурная схема электропривода, имеющего цифроаналоговую систему управления с импульсным датчиком положения, приведена на рис. 8.17. Задание по скорости при данной схеме введено в состав заданного временного закона перемещения 63(Г), который при постоянной скорости со3 определяется как 93(0 = со/. Счетчик /34 (см. рис. 8.14) представлен здесь узлом суммирования сигналов ВД = 1/з/ И /Vo.c(0 = i/o.c/. 11 Линеаризуя характеристики АЦП и ЦАП, получим выражения для рассогласования (ошибки слежения) в установившемся режиме движения электропривода: Д9 = А AN = -. А Здесь D, = к, где кт и к{ i - "-ацпцапрпсп - добротность СЭП по скорости, с-1, сп - передаточные коэффициенты соответственно ре- гулятора положения и скоростной подсистемы; ацп - ид N ид 2тг fo.c 1 2 3 4 5 6 7 К К N К К N L 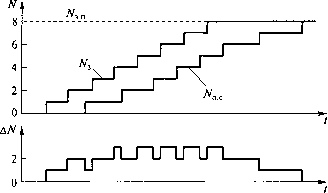 Рис. 8.18. Диаграмма отработки заданного перемещения электроприводом, имеющим цифроаналоговую систему управления с импульсным датчиком положения Режим отработки заданного перемещения величиной в восемь импульсов с частотой вращения рабочего органа л3 = 2 с-1, т. е. при Уз = 2 Гц проиллюстрирован на рис. 8.18. Ошибка в установившемся режиме AN 3, а в режиме покоя ошибка позиционирования AN=0 при П-РС и Мтт = 0 или при Мнаг = const ф 0, но ПИ-РС. В системах электропривода постоянного тока с тиристорным преобразователем (ТП) при цифровом управлении током целесообразно выполнить также цифровой и систему импульсно-фазо-вого управления (СИФУ) ТП, так как выход цифрового регулятора тока является входом СИФУ. При любом исполнении, аналоговом или цифровом, СИФУ должна выполнять функции: 1)синхронизации с сетью, питающей ТП; 2)выбора вентильной группы для движения вперед или назад; 3)смещения угла открывания тиристоров относительно момента естественного открывания; 4)определения тиристора, на который следует подать управляющий импульс; 5)создания управляющих импульсов. Наиболее простым и распространенным типом аналоговой СИФУ является многоканальная СИФУ с вертикальным принципом регулирования угла открывания а. В данной СИФУ вторая из вышеперечисленных функций осуществляется выбором знака гти S и ГО о о. s (/г) ШЛА Программная часть Аппаратная часть (Тп) БС БЗИ шс БРИ -Т1 -Т2 -ТЗ -Т4 -Т5 -Т6 Рис. 8.19. Схема программно-аппаратной одноканальной СИФУ входного управляющего напряжения иу, третья - сравнением уровней иуи опорного напряжения иоп, четвертая функция выполняется автоматически за счет смещения по фазам источников иоп, число которых равно числу тиристоров в вентильной группе ТП. Функциональная простота реализации многоканальной аналоговой СИФУ обусловливает возможность достаточно просто применить такую структуру и для построения цифрового варианта СИФУ [19]. При этом синусоидальные генераторы опорного напряжения заменяются цифровыми интеграторами, а сравнение иу и иоп заменяется сравнением на компараторах числа Ny, соответствующего требуемому углу открывания, с числом Nc2 на выходе счетчика. Аппаратный способ реализации такой СИФУ требует большого количества цифровых элементов - по шесть цифровых интеграторов, компараторов, усилителей и формирователей импульсов для одной мостовой трехфазной вентильной группы. Использование программного способа в построении СИФУ позволяет применять одноканальную структуру СИФУ с одним цифровым интегратором и заметно сократить число цифровых элементов. Рассмотрим программно-аппаратную одноканальную цифровую СИФУ (рис. 8.19). Ее программная часть, выполненная на микроЭВМ, на каждом интервале дискретности преобразователя (Ти) рассчитывает угол открывания а и номер тиристора Nr, который требуется открыть на данном интервале Тп. Аппаратная часть выполняет синхронизацию работы СИФУ с сетью, питающей ТП, осуществляет задержку времени для управляющих импульсов, создает необходимый по форме и мощности управляющий импульс и подает его на соответствующий тиристор. В аппаратную часть СИФУ входят следующие основные устройства: блок синхронизации БС; к к к к к к к к «й о «i о ис о 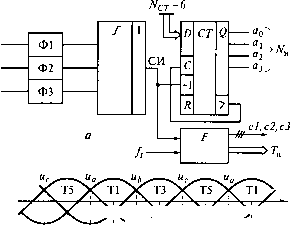 си- «1- а2- Т6 X Т2 X Т4 X Т6 v w 15 JO Ll [2 [3 [4 [5 [o j m m п m n Рис. 8.20. Схема (а) и диаграмма работы (сТ) блока синхронизации СИФУ блок задержки импульсов БЗИ; блок распределения импульсов БРИ. Блоки аппаратной части СИФУ связаны с микроЭВМ шинами данных и адресов ШДА и шиной синхронизации ШС. Блок синхронизации вырабатывает систему импульсов, сфази-рованных относительно напряжения питания ТП и синхронизирующих работу микроЭВМ с БЗИ и БРИ. В состав БС входят (рис. 8.20, а): фильтры Ф1, Ф2, ФЗ, выделяющие первые гармоники фазных напряжений иа, иь, ис; нуль-орган, создающий синхронизирующие импульсы (СИ) в моменты естественного открывания тиристоров; двоичный счетчик с числовой емкостью NCT, выдающий номер интервала проводимости ТП - NK; функциональный преобразователь F, дающий информацию о продолжительности интервала дискретности Тп, а также импульсы cl, с2, сЗ записи и стирания данных в БЗИ и БРИ и запрета счета микро-ЭВМ. Работа БС для трехфазной мостовой схемы ТП проиллюстрирована диаграммой, приведенной на рис. 8.20, б. Выходные сигналы аъ аи а0 счетчика, образующие в двоичном коде число Nu, изображены в функции coc/, где сос - угловая частота напряжения сети (сос = 2к/с). Синхронизирующие импульсы, поступающие на суммирующий вход счетчика, определяют на его выходе шесть разных интерва- лов проводимости, т.е. интервалов состояний тиристорного моста с номерами Na = 0, 5. Счетчик в составе БС работает в циклическом режиме, повторяя номера интервалов через период сетевого напряжения. На каждом интервале микроЭВМ рассчитывает величину задержки открывающего импульса относительно точки естественного отпирания ТП и номер 7VT открываемого на данном интервале тиристора. Рассмотрим, как решается эта задача в данной СИФУ. Угол открывания тиристоров а рассчитывается микроЭВМ по алгоритму регулятора тока (см. рис. 8.10) и определяется относительным числом N = «У =Е + Да*, где т - число тиристоров; Е - целая часть 7Va, т.е. целое число интервалов проводимости ТП; Да* < 1 - дробная часть Na, т.е. часть одного интервала проводимости. Так как 0 < a < 180°, то для трехфазной мостовой схемы ТП с т = 6 Сможет принимать одно из трех значений (0, 1,2), соответствующих угловым интервалам 0...60°, 60... 120°, 120... 180°. Номер тиристора, который необходимо открыть на данном интервале дискретности, зависит от номера этого интервала Nn и величины Е. Действительно, из диаграммы на рис. 8.20, б следует, что, например, для N„ = 2 и Е = 0 нужно открыть тиристор ТЗ, а для N„ = 2 и Е = 2 - тиристор Т1. Алгоритм определения номера тиристора можно представить в виде таблицы (рис. 8.21, а). Для определения номера открываемого тиристора Nr имеются несколько условий. 1.Если при переходе от предыдущего интервала [п- 1] к последующему [п] АЕ = Е[п] - Е[п - 1] = 0, то Nr[n] определяется по горизонтальной строке таблицы на рис. 8.21, ас заданным значением Е: NT[n] = N„[n] + 1-Едля Nm > Е или Nr[n] = Nu[n] + 1 - Е+ тдля 7V„ < Е. 2.Если АЕ = 1, то включение очередного тиристора происходит через один интервал, т.е. NT[n] = Na[n- 1], откуда Nr[n + \] = NT[n-\] + Iдля/VT[/i-l] *6 или Nr[n+\] = \для NT[n- 1] = 6. 3.Если АЕ= 2, то включение очередного тиристора происходит через два интервала, т.е. Щп + 1] = N[n] = NT[n -I], откуда NT[n + 2] = NT[n - I]для 7VT[«-1] *6 0 ... 44 45 46 47 48 49 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||












